


Tecnologias emergentes, como algoritmos de inteligência artificial (AI), robôs móveis e veículos aéreos não tripulados (UAVs), podem aprimorar as práticas em uma variedade de campos, incluindo a cinematografia. Nos últimos anos, muitos cineastas e empresas de entretenimento começaram a explorar especificamente o uso de UAVs para capturar imagens aéreas de alta qualidade (ou seja, vídeos de locais específicos tirados de cima).
Pesquisadores da Universidade de Zaragoza e da Universidade de Stanford criaram recentemente o CineMPC, uma ferramenta computacional que pode ser usada para controlar de forma autônoma câmeras de vídeo on-board de drones. Esta técnica, introduzida em um artigo pré-publicado no arXiv, poderia aprimorar significativamente as práticas atuais de cinematografia com base no uso de UAVs.
“Ao ler a literatura existente sobre cinematografia autônoma e, em particular, drones de filmagem autônoma, percebemos que as soluções existentes se concentram no controle dos extrínsecos da câmera (por exemplo, a posição e as rotações da câmera),” Pablo Pueyo, um dos pesquisadores quem realizou o estudo, disse TechXplore. “De acordo com a literatura cinematográfica, no entanto, um dos fatores mais decisivos que determinam uma boa ou má filmagem é o controle dos parâmetros intrínsecos da lente da câmera, como distância focal, distância focal e abertura do foco”.
Os parâmetros intrínsecos de uma câmera (por exemplo, distância focal, comprimento e abertura) são aqueles que determinam quais partes de uma imagem estão em foco ou desfocadas, o que pode, em última análise, mudar a percepção do espectador de uma determinada cena. Ser capaz de alterar esses parâmetros permite que os cineastas criem efeitos específicos, por exemplo, produzindo filmagens com profundidade de campo variável ou ampliando efetivamente em partes específicas de uma imagem. O objetivo geral do trabalho recente de Pueyo e seus colegas era obter o controle ideal dos movimentos de um drone de forma a produzir automaticamente esses tipos de efeitos.
Em um de seus estudos anteriores, Pueyo e seus colegas desenvolveram uma abordagem chamada CinemAirSim. Essa técnica permitiu que simulassem drones com uma câmera cinematográfica de bordo que eles pudessem controlar. Ao integrar o CinemAirSim com o CineMPC, o novo algoritmo que desenvolveram, os pesquisadores foram capazes de simular os efeitos que mudanças específicas nos parâmetros intrínsecos de uma lente teriam no vídeo geral coletado por um drone.
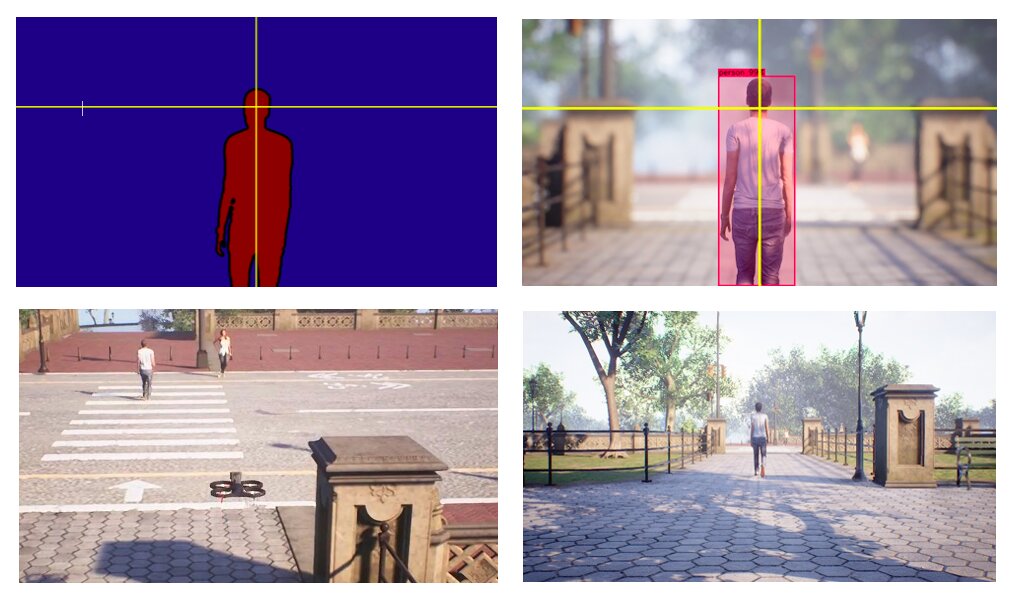
“Usando o conhecido Model Predictive Control (MPC), um método avançado de controle de processo, otimizamos os parâmetros extrínsecos e intrínsecos da câmera do drone para satisfazer um conjunto de diretrizes artísticas e de composição fornecidas pelo usuário”, explicou Pueyo. “O MPC encontra os parâmetros ideais para configurar a câmera, minimizando as funções de custo que estão relacionadas às restrições do usuário. Essas funções de custo são expressões matemáticas que nos ajudam a controlar alguns aspectos artísticos como a profundidade de campo, as tomadas canônicas descritas pelo literatura, ou a posição dos elementos da cena, como atores em uma posição particular da imagem resultante (por exemplo, satisfazendo a ‘regra dos terceiros’). ”
O CineMPC pode detectar objetos ou pessoas específicos em uma cena e rastreá-los ao longo de uma trajetória de câmera específica especificada por um usuário. Notavelmente, esta trajetória “aproximada” também inclui informações associadas relacionadas aos parâmetros intrínsecos mais desejáveis.
“Até o momento, e até onde sabemos, não existem soluções anteriores que otimizem os parâmetros da lente da câmera para atingir os objetivos cinematográficos”, disse Pueyo. “Isso é muito prático em termos de filmagem autônoma de drones. Não especialistas e especialistas em cinematografia podem afirmar algumas restrições cinematográficas que nossa solução irá satisfazer ajustando os parâmetros extrínsecos e intrínsecos da câmera.”
No futuro, a nova ferramenta pode aprimorar a cinematografia baseada em drones, permitindo aos cineastas capturar imagens de alta qualidade de uma vista aérea. Ao contrário dos métodos desenvolvidos anteriormente, de fato, o CineMPC permite que os pesquisadores adaptem continuamente os parâmetros intrínsecos da câmera para atingir seus objetivos artísticos.
“Agora estamos planejando melhorar o CineMPC com ideias artísticas e robóticas mais sofisticadas”, disse Pueyo. “Por exemplo, gostaríamos de introduzir mais drones de filmagem (ou seja, desenvolver uma abordagem multi-robô) e otimizar a inteligência artística adicional para garantir que o drone possa decidir de forma autônoma as melhores diretrizes artísticas, em vez de seguir as restrições introduzidas por um usuário. “
Publicado em 07/05/2021 21h44
Artigo original:
Estudo original: