


Pesquisadores da Universidade Carnegie Mellon criaram recentemente o PATRICK, um robô macio sem cabos que replica artificialmente a estrutura e o comportamento da estrela quebradiça, um invertebrado marinho intimamente relacionado à estrela do mar. Este robô bioinspirado exclusivo, apresentado em um artigo pré-publicado no arXiv, pode rastejar debaixo d’água usando cinco pernas acionadas por fios de liga com memória de forma (SMA).
“Este trabalho surgiu como uma extensão natural do trabalho anterior de nosso laboratório na criação de robôs macios não amarrados, usando fio muscular no lugar de motores elétricos”, disse ao TechXplore Zach Patterson, um dos pesquisadores que realizaram o estudo. “Nossa inspiração para PATRICK vem da estrela quebradiça, um parente surpreendentemente ágil da estrela do mar.”
Patterson e seus colegas se propuseram a desenvolver um robô macio que pudesse concluir missões simples debaixo d’água, mas que também poderia melhorar o entendimento atual da estrela quebradiça e seu comportamento de rastreamento subaquático. Para reproduzir a capacidade da estrela frágil de andar debaixo d’água de maneira mais eficaz, os pesquisadores acharam que seu robô não deveria ser amarrado a hardware externo, pois isso permitiria que ele se movesse mais livremente.
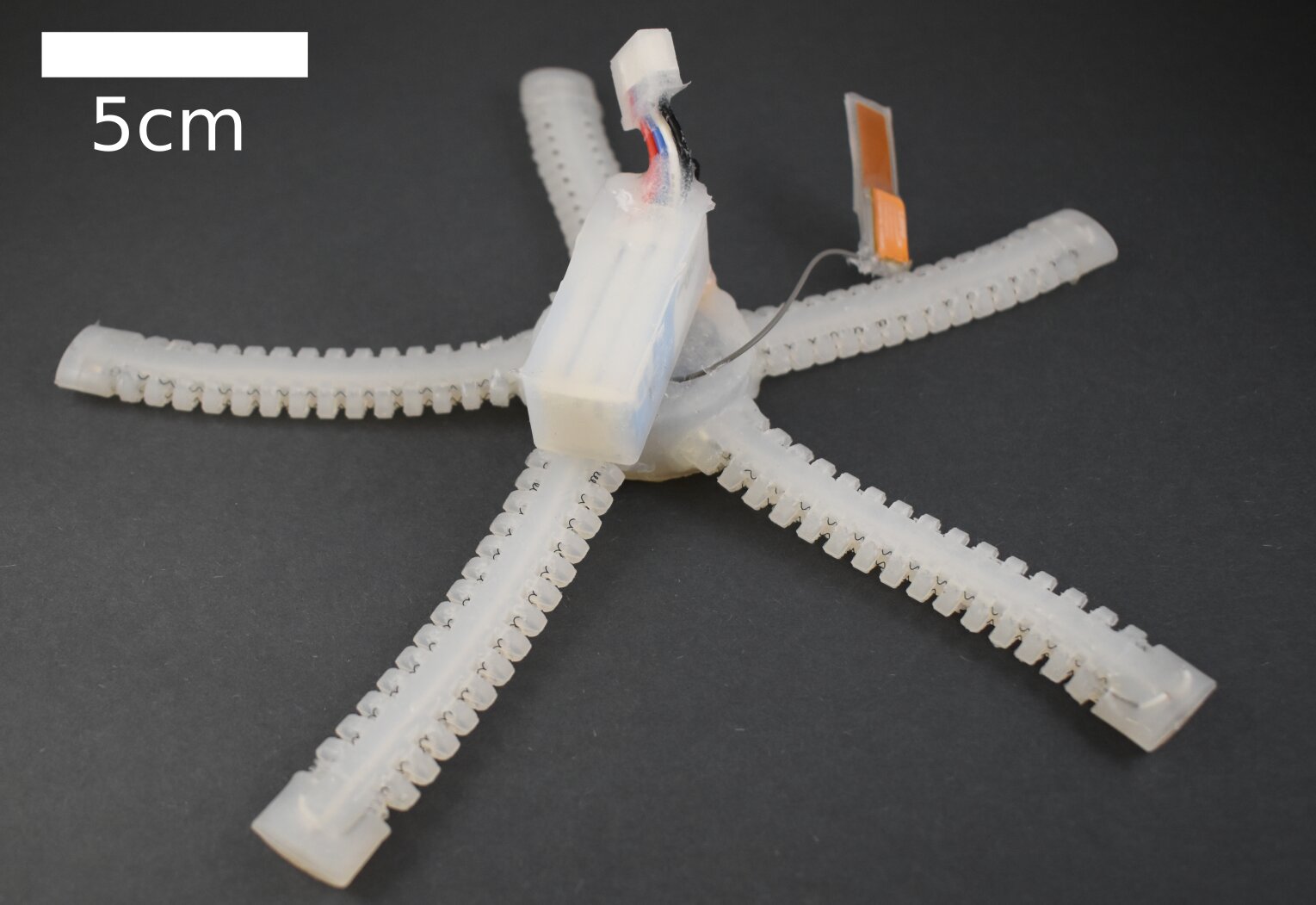
O PATRICK, o robô que eles desenvolveram, tem cinco membros alimentados por bobinas da SMA. SMA é um tipo de metal com várias propriedades vantajosas, incluindo alta flexibilidade à temperatura ambiente e um comportamento único quando aquecido. Quando uma corrente elétrica é aplicada a ele, de fato, o metal SMA aquece rapidamente e retorna a uma forma que adquiriu no passado.
“Usamos essas bobinas que mudam de forma como uma espécie de músculo”, fazendo com que as pernas do robô se dobrem nas direções desejadas “, disse Patterson.” O robô é principalmente feito de silicone, tornando-o altamente flexível e impermeável. Para controlar o movimento de PATRICK, desenvolvemos várias primitivas de movimento: padrões específicos de mudança de forma coordenados entre os membros que movem o robô como um todo “.
Além da alta flexibilidade, Patterson e seus colegas queriam que o robô pudesse sentir o ambiente ao redor e escolher em que direção seguir autonomamente. Para conseguir isso, eles desenvolveram uma estrutura que permite que o robô se comunique com dispositivos fora da água enquanto está submerso, via comunicação sem fio. Isso fornece à PATRICK recursos adicionais que não dependem apenas dos componentes de hardware relativamente baratos que compõem seu corpo, permitindo que ele autonomamente detecte seu ambiente e realize cálculos.
Outra propriedade interessante do robô macio desenvolvido por Patterson e seus colegas é que ele pode realizar uma grande variedade de movimentos possíveis debaixo d’água, pois suas pernas são feitas de vários ‘músculos’ da SMA que podem ser reorganizados de maneiras diferentes. Isso é um tanto raro para robôs móveis móveis, que normalmente são capazes apenas de alguns movimentos simples ou estilos de locomoção.
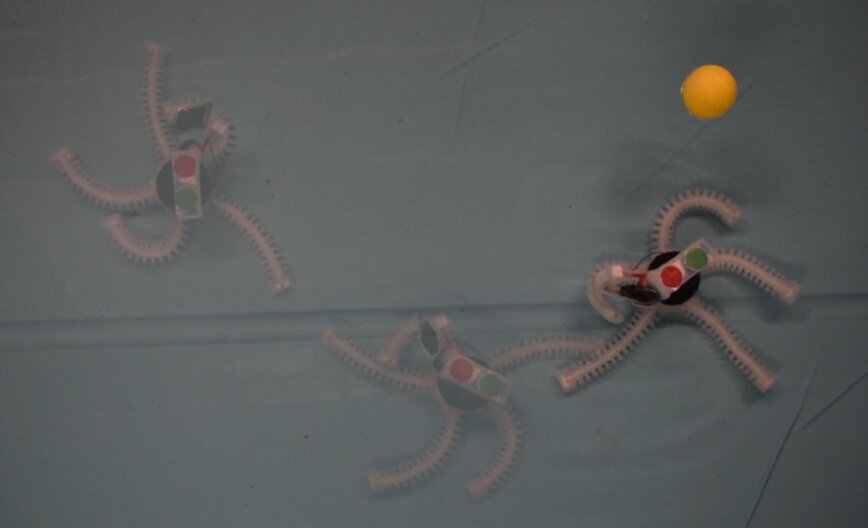
“Demonstramos que o robô pode avançar para os objetivos desejados em tempo real, o primeiro entre os robôs flexíveis”, disse Patterson. “Além disso, descobrimos que um robô flexível que não está preso a nenhum hardware externo pode atingir um alvo em movimento por conta própria, mesmo quando há um grande grau de incerteza no ambiente circundante e no comportamento do próprio robô. De fato, , devido às complexas interações entre temperatura, deformação do material e fatores como atrito, nunca temos certeza de como o robô se moverá em resposta a um determinado comando “.
A capacidade da PATRICK de se mover autonomamente debaixo d’água é um resultado direto de sua estrutura flexível e complexa. Embora seu design complexo também torne difícil prever seu comportamento, ele permite que o robô reaja automaticamente a distúrbios em seu ambiente, deformando e mudando de forma, sem a necessidade de algoritmos de controle caros e de alto desempenho.
No futuro, o robô inspirado em estrela quebradiça desenvolvido por essa equipe de pesquisadores poderá ter inúmeras aplicações úteis. Por exemplo, poderia ser usado para realizar explorações geológicas e obter amostras ecológicas ou biológicas minimamente invasivas. Além disso, Patterson e seus colegas esperam que o PATRICK também ajude o estudo dos mecanismos por trás da locomoção das estrelas quebradiças.
“Em nossos próximos estudos, experimentaremos mais algoritmos de controle e planejamento, desenvolveremos abordagens de aprendizado de máquina para controle e implementaremos sensores na estrutura para permitir que o robô realize uma variedade maior de tarefas úteis”, afirmou Patterson. “Como mencionado em nossos objetivos iniciais, também planejamos usar o PATRICK para entender melhor a locomoção de estrelas quebradiças e a caminhada subaquática em geral”.
Publicado em 22/04/2020 19h47
Artigo original:
Estudo original:
Achou importante? Compartilhe!


Assine nossa newsletter e fique informado sobre Astrofísica, Biofísica, Geofísica e outras áreas. Preencha seu e-mail no espaço abaixo e clique em “OK”: