



Pesquisadores da Universidade de Harvard desenvolveram recentemente um sistema baseado em detecção de Wi-Fi que pode aprimorar a colaboração entre robôs operando em ambientes não mapeados. Este sistema, apresentado em um artigo pré-publicado no arXiv, pode essencialmente emular conjuntos de antenas no ar enquanto um robô se move livremente em um ambiente 2-D ou 3-D.
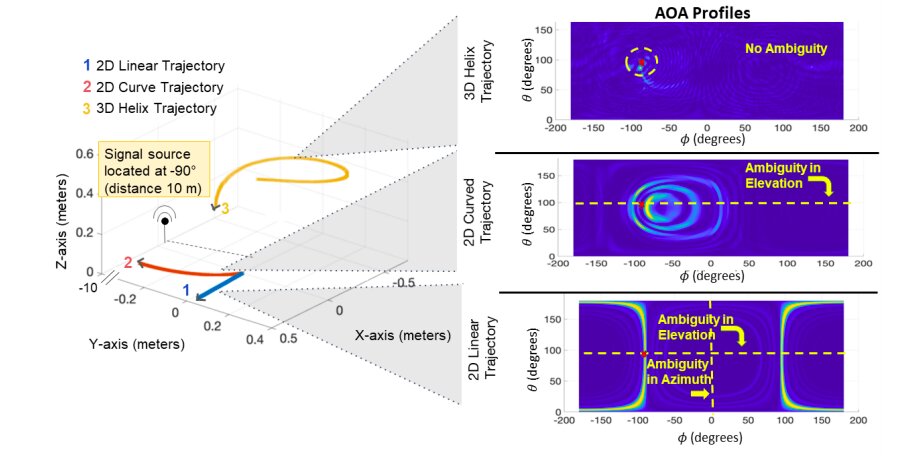
“O principal objetivo do nosso trabalho foi alavancar trajetórias 3-D arbitrárias para um robô (UAV ou UGV) equipado com um sensor de estimativa de trajetória a bordo”, disse Ninad Jadhav, um dos pesquisadores que realizou o estudo. “Isso permite que um robô receptor de sinal Wi-Fi estime a direção espacial (em azimute e elevação) de outros robôs vizinhos, capturando todos os caminhos de sinal sem fio que viajam entre o robô transmissor e receptor (que chamamos de perfil AOA). , também caracterizamos como a forma da trajetória impacta o perfil AOA usando o limite de Cramer Rao.”
Em seus estudos anteriores, Jadhav e seus colegas focaram em cenários de colaboração de robôs nos quais os robôs seguiram trajetórias 2-D com um conjunto limitado de geometrias (por exemplo, linear ou curva). O novo sistema que eles criaram, por outro lado, é aplicável a cenários em que robôs se movem livremente, seguindo uma gama mais ampla de trajetórias.
“Outra restrição que relaxamos no artigo foi a exigência de que um robô transmissor de sinal Wi-Fi permaneça estacionário enquanto o robô receptor se move e gera um perfil AOA”, disse Jadhav. “A nova abordagem que desenvolvemos leva em conta a mobilidade contínua de todos os robôs, independentemente de estarem transmitindo ou recebendo pacotes Wi-Fi.”
Como Jadhav e seus colegas queriam desenvolver um sistema que usasse apenas sensores montados diretamente em robôs, eles também examinaram o impacto das estimativas de trajetória local, que são intrinsecamente imperfeitas e sujeitas a erros, nos padrões em que os sinais de Wi-Fi viajam entre dois robôs (perfis AOA). Os pesquisadores então avaliaram o sistema que desenvolveram em uma série de experimentos usando robôs reais, alcançando resultados altamente promissores.
“O sistema que desenvolvemos captura essencialmente informações de todos os caminhos de sinal de Wi-Fi que viajam entre um robô transmissor e receptor”, explicou Jadhav. “Ele faz isso aproveitando a trajetória do robô receptor para emular um conjunto de antenas virtuais, algo semelhante ao radar de abertura sintética. Ao rastrear esse ‘conjunto de antenas no ar”, podemos então usar algoritmos de direção de chegada (DOA) baseados em conjuntos de antenas teoria (por exemplo, MUSIC ou Bartlett) para estimar a direção do caminho do sinal mais forte. ”
No sistema criado por Jadhav e seus colegas, um robô receptor primeiro extrai a fase de sinal bruto usando a caixa de ferramentas CSI de Dan Halprin. Posteriormente, ele combina esta fase de sinal bruto com informações sobre sua própria trajetória (ou seja, suas coordenadas X, Y, Z em 3-D), para emular uma matriz de antena virtual.
“Isso permite que o sistema calcule a mudança na fase do sinal entre os elementos consecutivos do conjunto de antenas”, disse Jadhav. “Finalmente, a mudança no sinal é usada por algoritmos DOA para obter o perfil AOA.”
O sistema tem várias vantagens. Primeiro, ele permite que os robôs estimem a localização de outros robôs, especialmente em ambientes desordenados ou desconhecidos, onde sensores tradicionais, como câmeras, podem não ser ferramentas eficazes para monitorar agentes. O novo sistema pode, assim, abrir novas possibilidades para melhorar a coordenação de robôs em tais ambientes.
“Nosso sistema usa trajetórias 3-D para maximizar a precisão do perfil AOA, bem como contabilizar a mobilidade contínua de todos os robôs”, disse Jadhav. “A caracterização de uma geometria de trajetória usando o limite de Cramer Rao, que chamamos de ‘informatividade da trajetória”, é um dos resultados críticos do artigo, pois nos permitiu provar teoricamente que as trajetórias 3-D de fato têm um desempenho melhor do que o 2-D trajetórias. ”
A métrica de ‘informatividade’ usada por Jadhav e seus colegas é uma ferramenta valiosa para testar se os movimentos que um robô está prestes a realizar podem fornecer um perfil AOA altamente preciso e, se não, se algo pode ser feito para melhorar a precisão do perfil. Nos próximos anos, o novo sistema que desenvolveram poderia ser usado para aprimorar a colaboração robô-robô em ambientes caóticos e não mapeados.
“Uma direção de pesquisa futura que estamos olhando é como essencialmente co-otimizar a trajetória e sua informatividade”, disse Jadhav. “Por exemplo, uma trajetória 2-D linear pode ser a mais eficiente para o robô ao executar alguma tarefa, mas a direção espacial correspondente (inferida a partir do perfil AOA) provavelmente terá um erro alto. Em vez disso, o que queremos é projetar uma trajetória ótima que faça uma troca entre eficiência e, ao mesmo tempo, reduza o erro na direção espacial. “
Publicado em 20/01/2021 13h05
Artigo original:
Estudo original: