


Equipes de vários robôs podem ajudar a resolver uma série de problemas complexos do mundo real, por exemplo, auxiliando agentes humanos durante missões de busca e resgate, monitorando o meio ambiente ou avaliando os danos causados por desastres naturais. Nos últimos anos, os sistemas multi-robô provaram ser particularmente úteis para resolver problemas que envolvem uma distribuição no espaço ou no tempo (ou seja, permitindo que os agentes cubram grandes distâncias ou monitorem processos ao longo do tempo).
Pesquisadores do Laboratório GRASP da Universidade da Pensilvânia desenvolveram recentemente uma estrutura que permite que equipes de robôs modelem processos ambientais ao longo do tempo. Essa estrutura, apresentada em um artigo pré-publicado no arXiv, pode permitir o uso de sistemas multi-robôs para prever a evolução de fenômenos complexos, dinâmicos e não lineares, como incêndios florestais, infestações de insetos ou dispersões de poluentes.
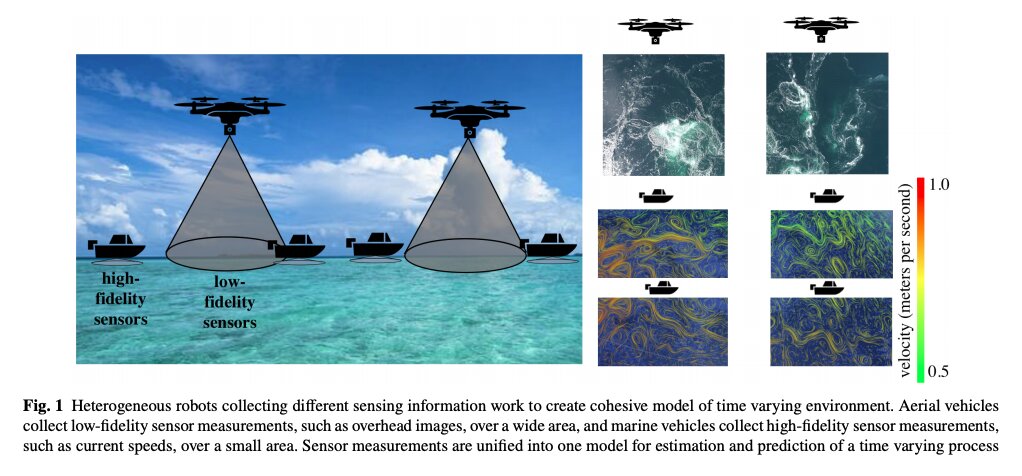
“Nós propomos uma estratégia acoplada, onde robôs de um tipo coletam medições de alta fidelidade em uma escala de tempo lenta e robôs de outro tipo coletam medições de baixa fidelidade em uma escala de tempo rápida, com o propósito de fundir medições”, Tahiya Salam e M. Ani Hsieh escreveu em seu jornal.
A estrutura desenvolvida pelos pesquisadores envolve o uso de duas equipes de robôs com diferentes padrões de movimento e capacidades de detecção (por exemplo, robôs aéreos, terrestres e marinhos). Como alguns processos ambientais podem ser complexos e multidimensionais, essas equipes de robôs podem explorar diferentes dimensões e coletar medidas distintas.
A estrutura dos pesquisadores funde as medições reunidas por duas equipes distintas de robôs para criar um modelo de processos espaço-temporais complexos e não lineares. Este modelo pode então ser usado para identificar os locais de detecção ideais para os robôs móveis e para prever como os processos ambientais irão se desdobrar ou evoluir ao longo do tempo.
“A estrutura apresentada permite uma dissociação dos modos temporais e espaciais aparentes nos dados”, escreveram os pesquisadores em seu artigo. “Esse desacoplamento é então usado dentro de uma estrutura de alocação de tarefas para vários tipos de robôs. Em vez de depender das abordagens de alocação de tarefas padrão normalmente usadas por estruturas robóticas heterogêneas, essa abordagem aproveita os pontos fortes exclusivos dos robôs para completar uma tarefa em conjunto. ”
Salam e Hsieh avaliaram sua estrutura em uma série de experimentos de realidade mista. Primeiro, eles avaliaram sua capacidade de prever a evolução de uma nuvem de plasma artificial. Para fazer isso, eles criaram um ambiente simulado que replica uma nuvem de plasma nas proximidades da Terra. Em seguida, eles introduziram quatro robôs marinhos e dois veículos aéreos no ambiente simulado, que deveriam reunir diferentes medições e estimativas associadas à evolução da nuvem.
Os pesquisadores usaram sua estrutura para criar um modelo que combinava as medições coletadas pelos veículos aéreos e marítimos simulados. Eles então compararam as previsões desse modelo com aquelas baseadas em medições coletadas por apenas um tipo de robô.
“Inicialmente, a abordagem heterogênea proposta tem um desempenho comparável ao uso apenas de dados homogêneos de veículos marinhos”, escreveram os pesquisadores em seu artigo. “Os dados homogêneos dos veículos aéreos são ruidosos e coletados em uma resolução espacial muito menor do que o processo real. Conforme o processo se torna mais complexo, a inclusão de vários tipos de dados permite que a abordagem proposta supere qualquer uma das outras estimativas.”
Para avaliar ainda mais seu desempenho, os pesquisadores avaliaram a capacidade de sua estrutura de modelar a densidade de uma nuvem de plasma artificial diferente projetada dentro de um tanque de água real. Neste experimento, eles coletaram medições usando três veículos de superfície micro-autônomos reais (mASVs), um mASV simulado e dois veículos aéreos simulados.
No geral, os testes realizados por Salam e Hsieh destacam as vantagens de fundir medições coletadas por diferentes tipos de robôs para modelar processos ambientais complexos, em vez de usar medições coletadas por um único tipo de robô. No futuro, sua estrutura poderia permitir aos cientistas construir mapas ou modelos unificados de diferentes ambientes, por exemplo, usando robôs aéreos e marinhos para mapear conjuntamente fatores como temperatura ou correntes oceânicas.
Publicado em 20/04/2021 11h46
Artigo original:
Estudo original: