


Os robôs podem ser aliados inestimáveis para idosos e pessoas com deficiências físicas, pois podem ajudá-los no dia-a-dia e reduzir sua dependência de cuidadores humanos. Um tipo de sistema robótico que pode ser particularmente útil são os robôs de alimentação assistida ou de transferência de mordida, projetados para pegar comida de um prato e alimentar humanos que não conseguem mover seus braços ou coordenar seus movimentos.
Embora muitas equipes de pesquisa em todo o mundo tenham tentado desenvolver sistemas de alimentação assistida por robôs, a maioria das soluções existentes não considera o quão confortável um usuário se sentirá ao receber uma mordida de comida do robô. Em outras palavras, esses sistemas podem ser eficientes em agarrar e transferir alimentos de diferentes formas e tamanhos, mas não consideram como a mordida será recebida pelos usuários, por exemplo, se o robô cutucará invertidamente o rosto ou a boca do usuário com o garfo enquanto entrega a mordida.
Pesquisadores da Universidade de Stanford, da Universidade de Washington e da Universidade de Cornell desenvolveram recentemente uma nova estrutura que tenta alcançar um equilíbrio ideal entre a eficiência e o conforto dos sistemas de alimentação assistida por robôs. Sua abordagem, introduzida em um artigo pré-publicado no arXiv, é baseada em um método computacional conhecido como ‘árvores aleatórias bidirecionais guiadas por heurística (h-BiRRT).
“Muito do nosso trabalho anterior neste espaço se concentrou no problema de apenas pegar comida de um prato”, disse Ethan K. Gordon, um dos pesquisadores que realizaram o estudo, ao TechXplore. “Basicamente, o robô aproximava a comida da boca e dava um dia. No entanto, tanto em demonstrações formais quanto informais, os novos usuários quase sempre expressavam desconforto com a abordagem. É um garfo, um utensílio afiado, então o desconforto é compreensível.”
Com base em seus estudos anteriores, Gordon e seus colegas começaram a explorar se poderiam melhorar o conforto dos sistemas de alimentação robótica. O objetivo geral de seu artigo recente foi entender melhor a sensação de desconforto relatada pelos usuários que fazem testes e encontrar uma maneira de mitigá-la.
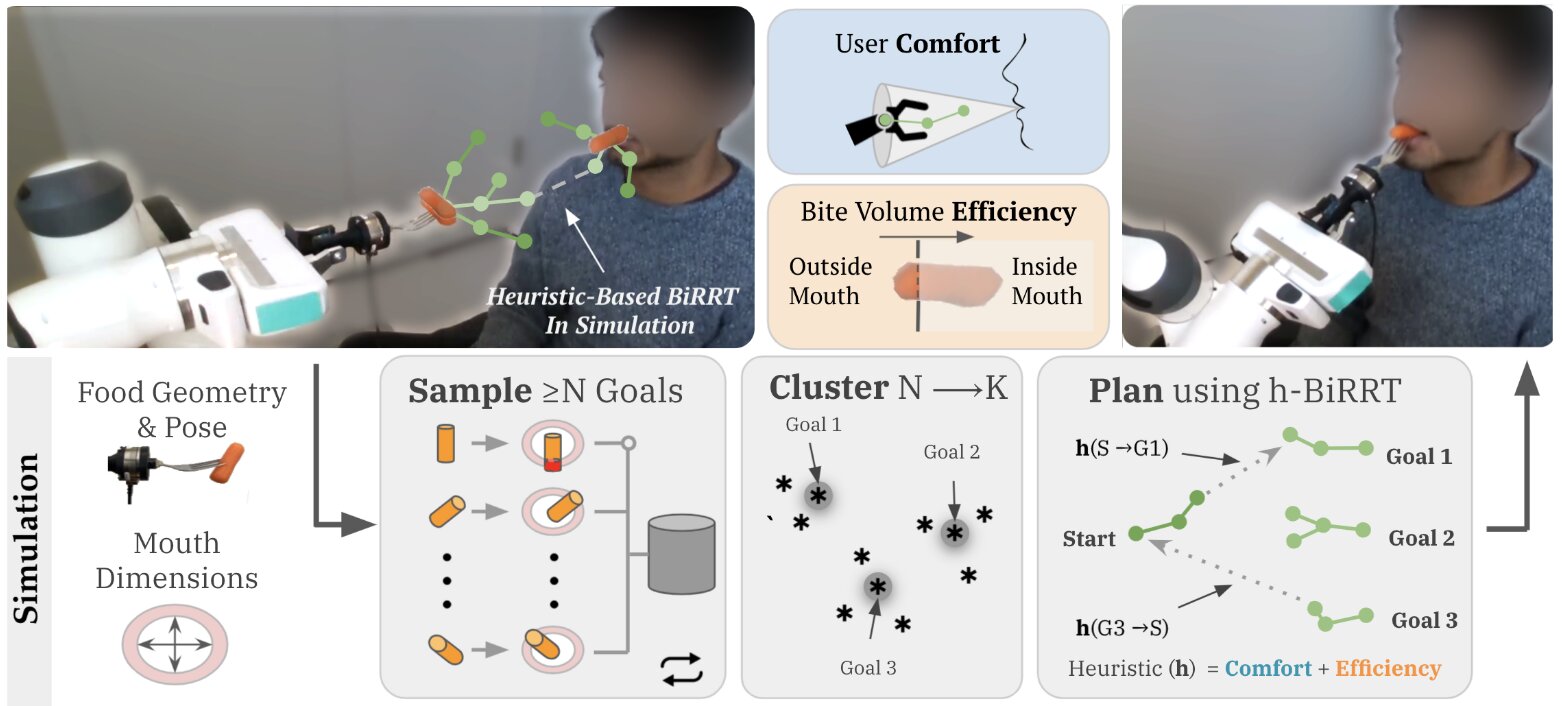
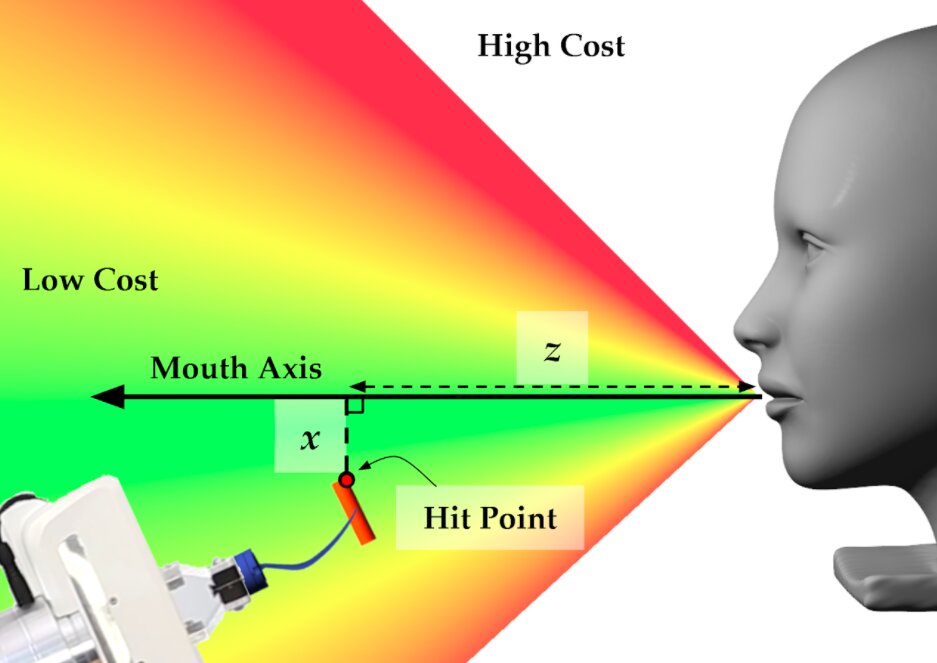
Sua abordagem funciona identificando trajetórias promissoras de transferência de mordida em simulações. Simultaneamente, também considera a geometria do alimento e a pose do garfo, para garantir que ele minimize as colisões com a boca do usuário.
“Nossa abordagem considera o conforto diretamente”, explicou Gordon. “Equilibrando isso com ‘eficiência’ (ou seja, quanto da comida o usuário é capaz de retirar teoricamente do garfo), nós o adicionamos como uma heurística de custo explícita ao nosso planejador de movimento.”
A equipe avaliou sua nova estrutura de transferência de mordida assistida por robô em uma série de avaliações do mundo real, usando um braço robótico Franka Emika Panda. Este sistema consiste em um garfo conectado a um sensor F/T de 6 eixos ATI Mini45, por meio de uma montagem impressa em 3D. O robô também integra uma câmera externa Intel Realsense RGB-D.
“Notavelmente, descobrimos que os usuários preferiram significativamente as transferências produzidas por nossa abordagem àquelas produzidas por um método de linha de base”, disse Gordon. “Nossas descobertas implicam que uma heurística bem projetada pode percorrer um longo caminho para tornar os sistemas HRI mais confortáveis para os colaboradores humanos com relativamente pouca complexidade adicional no lado do robô”.
No futuro, a nova abordagem pode aumentar o conforto dos sistemas de alimentação automatizados, facilitando sua implantação em instalações de saúde e outras configurações do mundo real. Enquanto isso, Gordon e seus colegas planejam desenvolver ainda mais sua estrutura, por exemplo, tornando o robô mais responsivo aos movimentos do usuário durante a transferência da mordida.
“Por exemplo, planejamos focar em questões como: como o robô deve ajustar a trajetória se o usuário se inclinar para pegar a comida?” “Além disso, nosso trabalho recente se concentrou principalmente em cenouras e outros alimentos análogos, duros e cilíndricos. Definitivamente, precisamos projetar um sistema que seja capaz de lidar com alimentos de todas as formas e viscoelasticidades diferentes”.
Publicado em 20/01/2022 06h47
Artigo original:
Estudo original: