



Nos últimos anos, os cientistas da computação desenvolveram robôs móveis que podem ser introduzidos em uma variedade de ambientes. Para navegar com eficiência em ambientes não estruturados, no entanto, esses robôs devem ser capazes de planejar caminhos seguros para chegar aos destinos desejados.
As abordagens existentes para planejar caminhos seguros para robôs se enquadram em duas grandes categorias. O primeiro tipo confia o controle do robô inteiramente a usuários humanos treinados, que devem monitorar os movimentos dos robôs e determinar suas trajetórias.
O segundo tipo de planejador é aquele que tenta treinar robôs para planejar seus próprios caminhos e se mover de forma autônoma. Embora alguns desses planejadores tenham alcançado resultados promissores, eles podem não ser confiáveis, especialmente quando um robô está navegando em ambientes complexos que também são habitados por humanos ou animais. Para obter resultados satisfatórios, esses planejadores geralmente requerem hardware e sensores caros.
Pesquisadores da Universidade de Trento desenvolveram recentemente uma estrutura alternativa para o planejamento do caminho do robô. Esta nova estrutura, apresentada em um artigo pré-publicado no arXiv, permite que os robôs identifiquem e aprendam caminhos seguros para um destino desejado simplesmente seguindo um operador humano andando na frente deles.
“Nas interações entre humanos e robôs em que um robô tem que seguir um operador humano navegando em ambientes de trabalho não estruturados e habitados por humanos, a segurança é obviamente de importância primordial”, disse Alessandro Antonucci, um dos pesquisadores que realizou o estudo, ao Tech Xplore . “O principal objetivo do nosso trabalho foi delegar ao ser humano a rotina de planejamento da trajetória do robô, que deve, no entanto, concentrar-se apenas na trajetória a percorrer. O robô, por sua vez, é capaz de memorizar o caminho percorrido e reutilizá-lo em futuras missões . ”
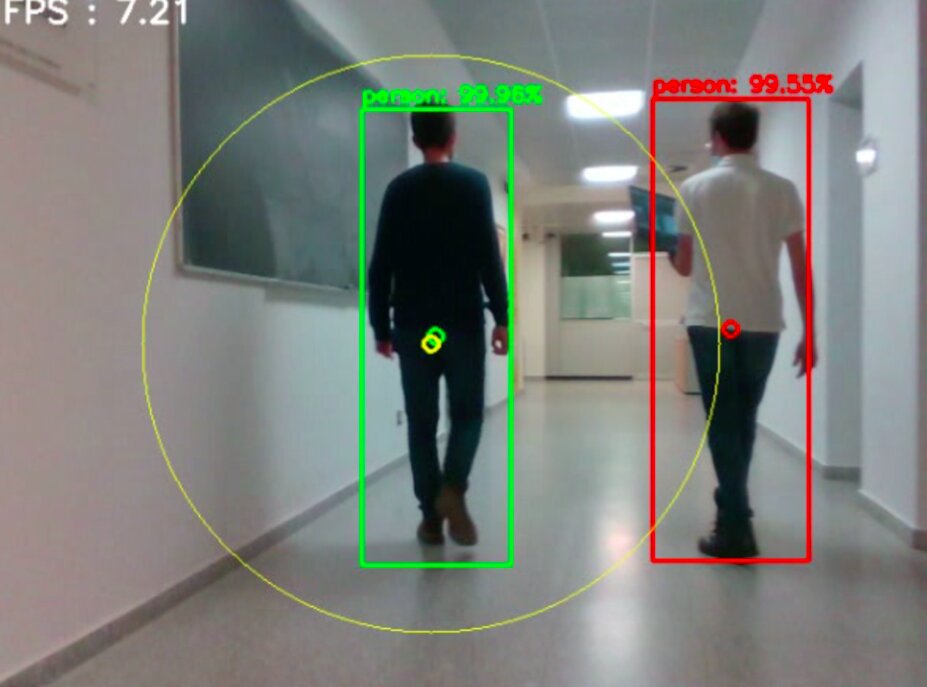
A abordagem desenvolvida por Antonucci e seus colegas simplifica muito a tarefa de planejamento de caminho, portanto, não requer sensores particularmente caros ou componentes de software altamente avançados. Essencialmente, a estrutura permite que os robôs reconheçam um ‘líder’ humano (ou ‘descobridor de caminhos’), para então localizar e rastrear seus movimentos.
“A fusão de sensores particular baseada em um scanner a laser e uma câmera de profundidade, que é uma peculiaridade de nosso trabalho, e montada no chassi do robô, permite ao robô distinguir o líder de outras pessoas em seu entorno, garantindo assim a robustez do rastreamento”. Disse Antonucci. “Além disso, a alta precisão da distância das entidades ao redor do robô garante sua segurança, já que o robô pode parar a tempo antes de colidir com obstáculos estáticos e outras pessoas.”
A abordagem dos pesquisadores utiliza uma combinação de técnicas de ponta. Além disso, sua estrutura é altamente modular, o que significa que pode ser adaptada, modificada e melhorada pela adição ou remoção de módulos, sem alterar seu design geral.
Antonucci e seus colegas avaliaram sua estrutura em uma série de experimentos. Eles descobriram que o desempenho era notavelmente bom, apesar de sua baixa complexidade e do baixo preço dos sensores que usaram.
No futuro, a nova abordagem concebida por esta equipe de pesquisadores poderá auxiliar no desenvolvimento de robôs móveis de baixo custo que possam navegar em ambientes não estruturados com segurança e eficiência. Como não requer sensores, hardware e software caros, a estrutura deve ser fácil de implementar em configurações do mundo real.
“Nossos próximos estudos se concentrarão em melhorar a interação entre o robô e o ser humano”, disse Antonucci. “No momento, se o robô percebe um obstáculo em seu caminho, ele só pode respeitar a segurança e parar. Estamos pensando, por exemplo, em adicionar dispositivos vestíveis com os quais o robô possa comunicar antecipadamente ao líder humano que o caminho que este último levou não é realmente apropriado para o robô. ”
Publicado em 10/08/2021 03h10
Artigo original:
Estudo original: