


À medida que os robôs são gradualmente introduzidos em vários ambientes do mundo real, desenvolvedores e roboticistas precisarão garantir que eles possam operar com segurança em torno de humanos. Nos últimos anos, eles introduziram várias abordagens para estimar as posições e prever os movimentos dos robôs em tempo real.
Pesquisadores da Universidade Federal de Pernambuco no Brasil criaram recentemente um novo modelo de aprendizado profundo para estimar a pose de braços robóticos e prever seus movimentos. Este modelo, introduzido em um artigo pré-publicado no arXiv, é projetado especificamente para aumentar a segurança dos robôs enquanto eles colaboram ou interagem com humanos.
“Motivados pela necessidade de antecipar acidentes durante a interação humano-robô (HRI), exploramos uma estrutura que melhora a segurança das pessoas que trabalham próximas aos robôs”, disse Djamel H. Sadok, um dos pesquisadores que realizaram o estudo, disse TechXplore. “A detecção de poses é vista como um componente importante da solução geral. Para isso, propomos uma nova arquitetura para Detecção de poses baseada em Convoluções Auto-Calibradas (SCConv) e Extreme Learning Machine (ELM).”
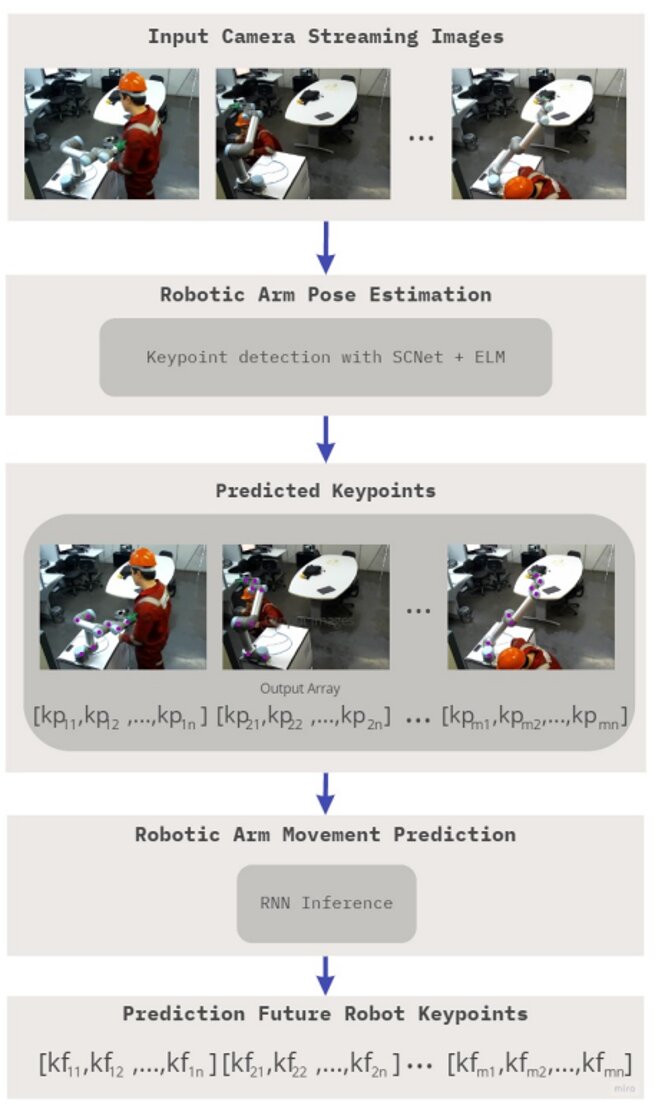
Estimar a pose de um robô é um passo essencial para prever seus movimentos e intenções futuras e, por sua vez, reduzir o risco de colidir com objetos nas proximidades. A abordagem para estimativa de pose e previsão de movimento introduzida por Sadok e seus colegas tem dois componentes principais, ou seja, um modelo SCConv e um modelo ELM.
O componente SCConvs melhora as dependências espaciais e de canal gerais de seu modelo. A abordagem ELM, por outro lado, é conhecida por ser uma abordagem eficiente para classificar dados.
“Observamos que não havia estudos existentes que combinassem essas duas tecnologias no contexto de nossa aplicação”, explicou Sadok. “Por isso, decidimos ver se tal combinação melhora nossa aplicação. Também melhoramos a estrutura aplicando a previsão de movimento, considerando a detecção de pose, usando redes neurais recorrentes (RNN).”

Primeiro, Sodok e seus colegas compilaram um conjunto de dados personalizado contendo imagens de cenas em que um braço robótico está interagindo com um usuário humano próximo. Para criar essas imagens, eles usaram especificamente o UR-5, um braço robótico criado pela Universal Robots.
Os pesquisadores anotaram essas imagens, principalmente as molduras do braço robótico. Isso permitiu que eles usassem o novo conjunto de dados para treinar o SCNet, o componente baseado em SCConv de sua estrutura.
“Nosso objetivo era melhorar o erro observado em comparação com outras arquiteturas conhecidas, como VGG ou ResNet”, disse Sadok. “Para extrair recursos, usamos SCNet e aplicamos o EML no final da rede. Em seguida, usamos o algoritmo Long Short-Term Memory (LSTM) e a Gated Recurrent Unit (GRU) para prever o movimento. Consideramos isso uma nova abordagem para resolver este problema.”
Sadok e seus colegas avaliaram o desempenho de sua estrutura em uma série de testes iniciais, onde tentaram estimar a pose e prever movimentos futuros de um braço UR-5, enquanto auxiliava um usuário humano em tarefas relacionadas à manutenção. Eles descobriram que ele alcançou resultados muito promissores, detectando a pose do braço robótico e prevendo seus movimentos futuros com bons níveis de precisão.
“Acreditamos que nossas principais contribuições são a geração de uma estrutura capaz de detectar a pose de um braço robótico e seus movimentos, consequentemente melhorando a segurança do braço”, disse Sadok. “Também expandimos a aplicabilidade do SSConv e EML e validamos seus recursos combinados.”
No futuro, a estrutura desenvolvida por essa equipe de pesquisadores poderá ser usada para melhorar a segurança de sistemas robóticos existentes e recém-desenvolvidos. Além disso, os algoritmos SCConv e ELM que eles usaram podem ser adaptados e aplicados a outras tarefas, como estimativa de pose humana, detecção de objetos e classificação de objetos.
“Agora planejamos expandir nossa estrutura para detecção de pose humana e fornecer um robô e estimativa de pose em conjunto”, acrescentou Sadok. “Combinando os dois dados, podemos trabalhar na previsão conjunta de ambos os movimentos, prevenindo ainda mais riscos decorrentes de sua interação como em uma planta fabril e classificando melhor o nível de risco.”
Publicado em 26/06/2022 18h58
Artigo original:
Estudo original: