



O desenvolvimento de robôs inspirados em animais e outros sistemas biológicos tornou-se um foco de pesquisa fundamental para muitos roboticistas em todo o mundo. Ao reproduzir artificialmente mecanismos biológicos, esses robôs podem ajudar a automatizar tarefas complexas do mundo real de maneira eficiente e confiável.
Pesquisadores da Università Politecnica delle Marche, na Itália, vêm tentando criar robôs bio-inspirados eficazes há vários anos. Em um artigo publicado recentemente na MDPI Robotics, eles apresentaram um robô submarino labriforme inovador que poderia ser usado por arqueólogos e outros cientistas para explorar remotamente ambientes subaquáticos.
“Tenho sonhado em projetar um companheiro biônico desde que vi o dinossauro voador robótico criado pelo Prof. Falken no famoso filme ‘Jogos de Guerra’ quando criança”, disse Daniele Costa, pesquisadora principal do estudo, ao TechXplore. “Trabalho com biomimética desde a minha tese de graduação, desenvolvendo uma ideia nascida da mente engenhosa do meu colega e padrinho, o Prof. David Scaradozzi, e mais tarde durante o meu doutoramento com o meu grupo de investigação orientado pelo Prof. Massimo Callegari.”
O principal objetivo da maioria dos estudos recentes conduzidos por Costa e seu grupo de pesquisa é desenvolver um veículo autônomo ou robô que possa nadar debaixo d’água. Para conseguir isso, eles se inspiraram nos princípios da dinâmica dos fluidos que sustentam a locomoção de peixes e outros animais marinhos.

“O desempenho propulsor dos peixes está muito além do estado da arte da tecnologia náutica moderna em termos de capacidade de propulsão, aceleração e manobrabilidade”, explicou Costa. “No entanto, a intenção do nosso projeto não é o desenho de uma cavala biônica; isso seria imitar a natureza, o que difere da biomimética. Criar um peixe robótico que inclua todas as características de seus equivalentes biológicos continua sendo uma necessidade quando o objetivo é investigar a mecânica dos fluidos da natação.”
Geralmente, projetos robóticos de inspiração biológica tentam explorar mecanismos biológicos que permitem a locomoção de animais para superar problemas que prejudicam o desempenho de robôs ou veículos. Por exemplo, eles poderiam tentar replicar mecanismos específicos para obter cruzeiro e manobrabilidade com eficiência de energia.
“Nosso estudo foi uma longa jornada cheia de obstáculos”, explicou Costa. “Começamos do zero com quase nenhuma experiência no campo da biomimética. Também nos faltavam recursos em termos de capacidade de fabricação, modelos matemáticos e simuladores. Por sorte, tínhamos muito tempo e entusiasmo, então começamos a coletar recursos como impressoras 3D, e desenvolvemos nossa plataforma de simulação e design, a mesma que usamos em nosso último artigo.”
Além de projetar sistemas bio-inspirados que podem ser implementados em ambientes do mundo real, Scaradozzi, em colaboração com ANcybernetics (uma start-up associada ao seu laboratório), vem criando protótipos de sistemas robóticos que podem ser usados para ensinar ciência, tecnologia , engenharia e matemática (STEM) nas escolas primárias e secundárias. O protótipo do robô que eles estão usando para fins educacionais tem a forma de um peixe, para conscientizar as novas gerações sobre a proteção dos animais marinhos e seus ambientes.
A ideia para o robô labriforme apresentado em seu recente artigo veio a Costa enquanto ele estava concluindo seu doutorado. estudos. Como os sistemas em que estava trabalhando na época tinham capacidades de manobra limitadas, ele decidiu criar um sistema de remo que permitisse que eles girassem na água enquanto estivessem parados.
“Infelizmente, na época não tive o tempo necessário para desenvolver minha solução, até que o recente bloqueio da pandemia me obrigou a ficar em casa por alguns meses”, disse Costa. “Durante esse período, eu projetei o mecanismo de acionamento das barbatanas peitorais apresentado em nosso artigo.”
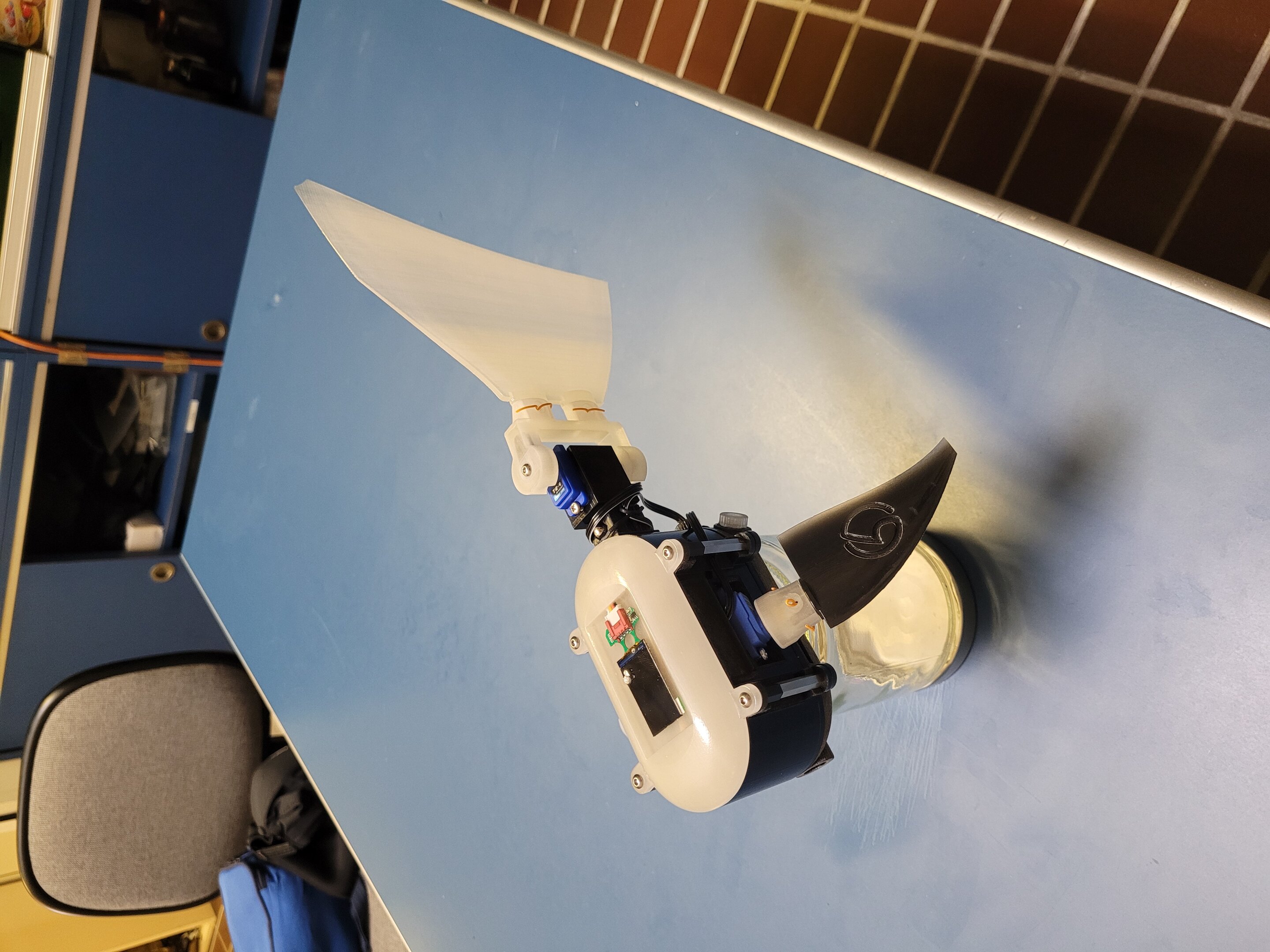
O novo robô criado pelos pesquisadores pode girar na água usando um mecanismo que lembra o de um barco a remo. Mais especificamente, suas barbatanas peitorais se movem em direções opostas, criando forças de arrasto que se combinam em um torque de direção. Esse mecanismo de “remo” se assemelha ao observado em muitos animais marinhos que caçam e se alimentam debaixo d’água.
“Os peixes robóticos propostos anteriormente podem usar até quatro servomotores para acionar suas barbatanas”, explicou Costa. “Ao contrário, nosso projeto tem um único motor. Além de uma redução na carga e inércia, a principal melhoria de nossa solução é a sincronização inerente do sistema entre as aletas esquerda e direita. Os problemas de impermeabilização também são mínimos porque apenas um motor precisa ser selado.”

Até agora, Costa e seus colegas avaliaram seu sistema em uma série de testes executados em um ambiente simulado multifísico. Nesses testes, seu robô parecia ser mais rápido, robusto e confiável do que outros robôs subaquáticos desenvolvidos no passado.
“Ao longo de milhões de anos em um reino vasto e muitas vezes hostil, os peixes desenvolveram capacidades de propulsão muito superiores em muitos aspectos ao que foi alcançado pela tecnologia náutica”, disse Costa. “Os veículos subaquáticos normalmente usam hélices para gerar o impulso necessário. No entanto, as aplicações em ambiente marinho exigem dispositivos que possam combinar boa manobrabilidade e altas velocidades de cruzeiro. Veículos movidos a hélices não são capazes de combinar ambos.”
A maioria dos robôs subaquáticos muda a direção em que se movem debaixo d’água com um raio de giro várias vezes maior que seu comprimento. Embora sua manobrabilidade possa ser melhorada com a adição de mais hélices ao corpo, isso também pode aumentar as forças de arrasto que atuam nos robôs e reduzir suas velocidades de cruzeiro.
“Os ambientes marinhos também são povoados por uma grande variedade de vegetação que as hélices podem danificar”, explicou Scaradozzi. “Em contraste com outras soluções existentes, um veículo subaquático que implemente técnicas de locomoção natural pode atingir velocidades da ordem de cinco comprimentos de veículo por segundo, com um raio de giro menor que o comprimento de um veículo, sem perturbar de maneira não natural os ambientes pelos quais navega.”

No futuro, o novo robô apresentado por essa equipe de pesquisadores poderá ter uma ampla gama de aplicações valiosas. Por exemplo, pode ser usado para monitorar costas, verificar infraestruturas ou instalações offshore e coletar dados em sítios arqueológicos ou em ambientes marinhos delicados. O Prof. Scaradozzi atua há mais de quinze anos nas áreas de proteção do meio ambiente marinho e documentação de sítios arqueológicos, em cooperação com o Ministério do Patrimônio Cultural italiano.
“O projeto está no início da fase de testes”, acrescentou Costa. “No entanto, devemos esperar por um clima mais ameno antes que os testes reais possam começar. Agora planejamos expandir ainda mais nossa plataforma multifísica para implementar manobras de mudança de profundidade e restauração. ferramenta.”
Publicado em 27/02/2022 08h05
Artigo original:
Estudo original: