


Para navegar com eficácia em ambientes do mundo real, os robôs com pernas devem ser capazes de se mover rápida e livremente, mantendo o equilíbrio. Isso é particularmente verdadeiro para robôs humanóides, robôs com duas pernas e uma estrutura corporal semelhante à humana.
Construir robôs estáveis nas pernas ao caminhar pode ser desafiador. Na verdade, os robôs com pernas normalmente têm dinâmica instável, devido à sua estrutura semelhante a um pêndulo.
Pesquisadores da Universidade de Ciência e Tecnologia de Hong Kong desenvolveram recentemente um pé robótico baseado em visão computacional com capacidades de detecção tátil. Quando integrado na extremidade das pernas de um robô, o pé artificial pode aumentar o equilíbrio e a estabilidade do robô durante a locomoção.
“Nosso artigo recente enfoca a aplicação de detecção tátil baseada na visão em robôs com pernas”, disse Guanlan Zhang, um dos pesquisadores que realizou o estudo, ao TechXplore. “É baseado na ideia de que a sensação tátil / háptica desempenha um papel importante na interação humana com o meio ambiente.”
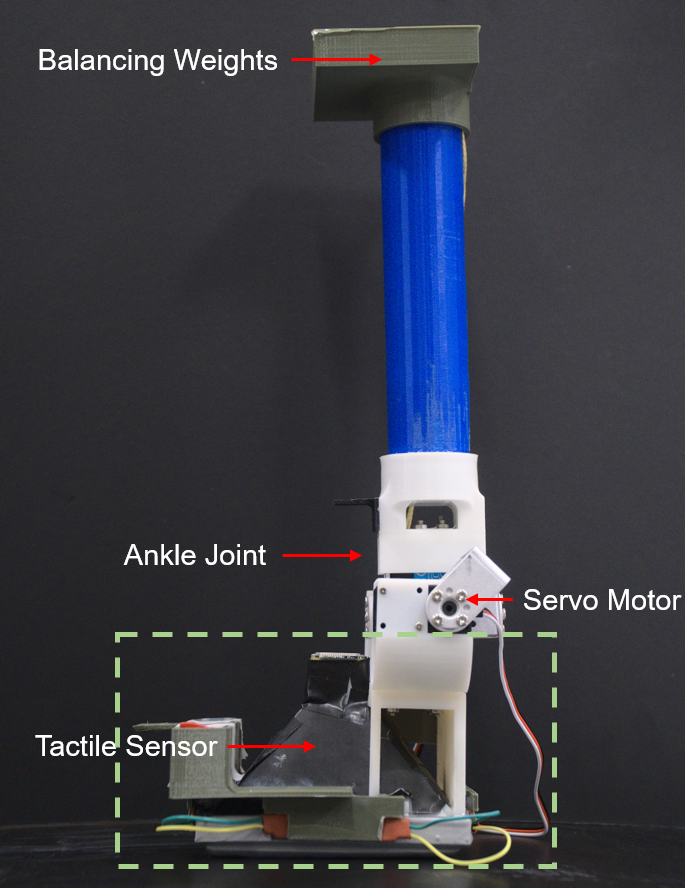
O objetivo geral do estudo recente de Zhang e Yipai Du, sob a orientação de seu orientador Professor Michael Y. Wang no HKUST Robotics Institute, era desenvolver robôs que podem detectar superfícies enquanto completam tarefas em um determinado ambiente, assim como os humanos fariam. Mais especificamente, eles queriam permitir que os robôs equilibrassem suas pernas sentindo o chão abaixo deles. Para conseguir isso, eles inseriram uma “pele” macia e artificial sob o pé robótico e instalaram uma câmera dentro dela, logo acima da “pele”.
“Pintamos deliberadamente padrões especiais na parte interna da pele, e a câmera que usamos pode capturar esse padrão”, explicou Zhang. “Conforme o pé toca o solo, a pele macia se deforma devido a forças externas. O padrão também se deforma e, por meio da deformação do padrão, podemos obter informações de contato, como o grau de ângulo de contato entre o pé e o chão e a inclinação da perna. ”
O pé artificial desenvolvido pelos pesquisadores pode coletar informações muito mais ricas sobre a superfície em que um robô está caminhando do que os sensores convencionais. Essas informações podem então ser usadas para melhorar a estabilidade de um robô em cenários onde os sistemas de balanceamento baseados em sensores tradicionais podem falhar ou funcionar mal.
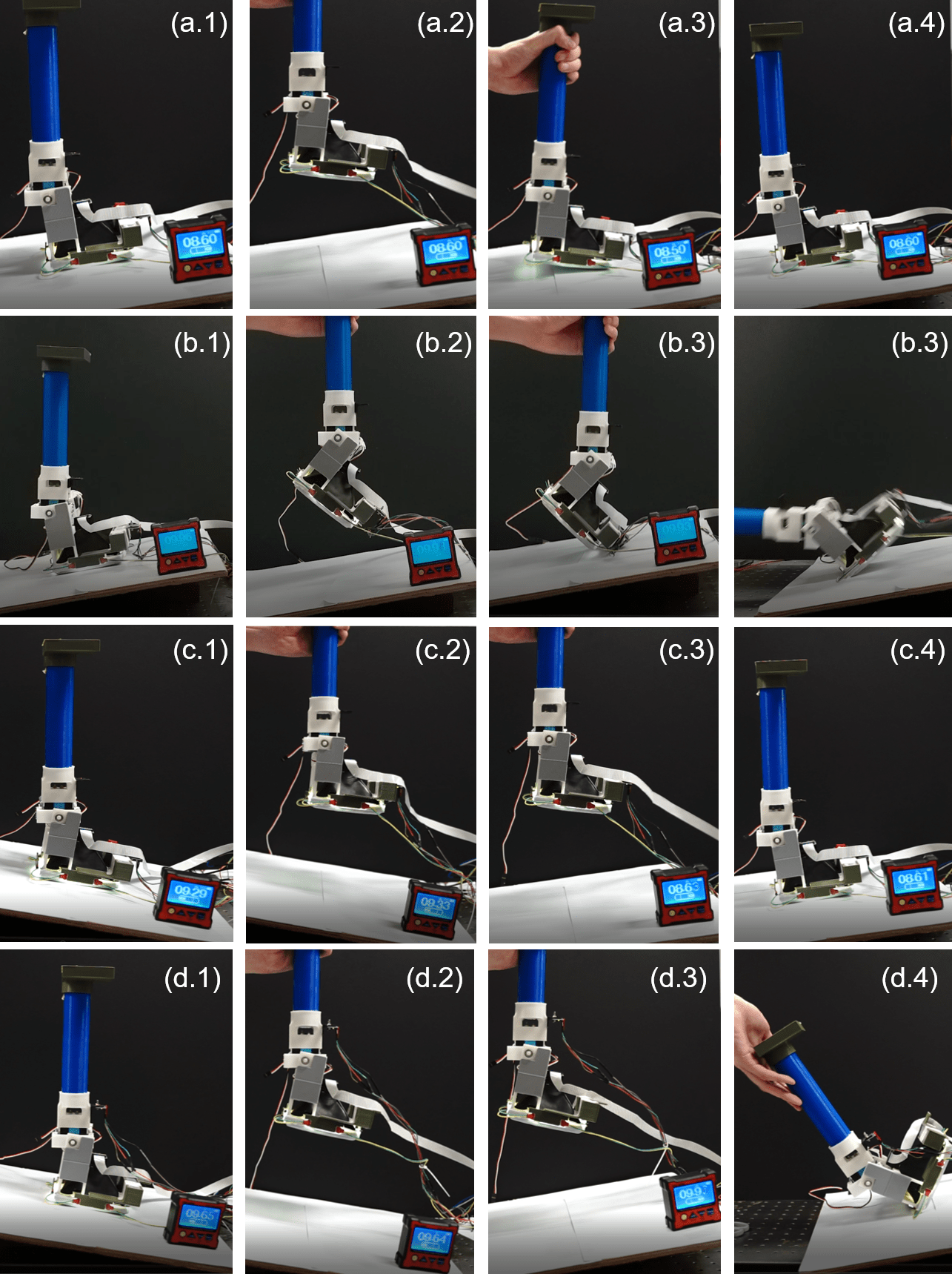
Para converter imagens coletadas pelo pé em dados relacionados ao contato, os pesquisadores usaram uma nova estrutura de aprendizagem profunda que desenvolveram. Posteriormente, eles realizaram testes para avaliar a estabilidade de uma perna robótica com o pé integrado nela. Eles descobriram que o pé podia estimar com sucesso o ângulo de inclinação da superfície abaixo dele e a postura do pé.
Além disso, Zhang e seus colegas realizaram uma série de experimentos para testar a viabilidade e eficácia geral do sistema robótico tátil que eles criaram. Seu sistema superou significativamente os sistemas robóticos convencionais de perna única, permitindo maior equilíbrio e estabilidade.
“Durante nossos experimentos, descobrimos que as informações contidas no fenômeno de contato são mais do que esperávamos”, disse Zhang. “Assim, abandonamos alguns conhecimentos redundantes obtidos pelo sensor. No entanto, informações de alto nível, como eventos (escorregamento, colisão, etc.), também podem ser detectados ou previstos pelo pé sensível ao tato.”
No futuro, o pé robótico criado por esta equipe de pesquisadores poderá ser usado para desenvolver robôs com pernas que podem manter sua estabilidade ao caminhar em diferentes terrenos e superfícies. Além disso, poderia permitir movimentos de pernas e estilos de locomoção mais complexos em robôs humanóides.
“No futuro, gostaríamos de aplicar nosso sensor em um robô de pernas reais e realizar experimentos relacionados à interação robô-ambiente”, disse Zhang. “Queremos focar em como as informações táteis estão relacionadas a alguns eventos na locomoção, como escorregões. E como fazer uso dessas informações no controle do robô”.
Publicado em 01/05/2021 13h01
Artigo original:
Estudo original: