



Pesquisadores do Hybrid Robotics Group da UC Berkeley, da Simon Fraser University e do Georgia Institute of Technology criaram recentemente um modelo de aprendizado por reforço que permite que um robô quadrúpede jogue futebol com eficiência no papel de goleiro. O modelo apresentado em um artigo pré-publicado no arXiv melhora as habilidades do robô ao longo do tempo, por meio de um processo de tentativa e erro.
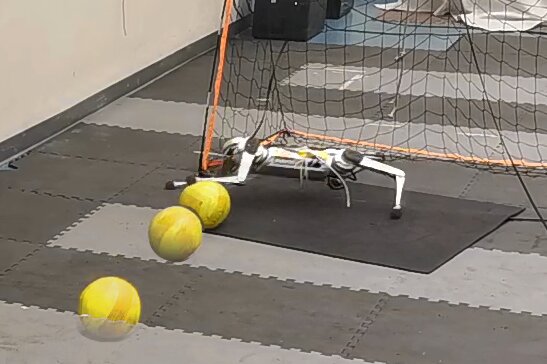
“Ao deixar os quadrúpedes jogarem futebol, podemos ultrapassar os limites da inteligência artificial dos robôs de pernas atléticas”, Xiaoyu Huang, Zhongyu Li, Yanzhen Xiang, Yiming Ni, Yufeng Chi, Yunhao Li, Lizhi Yang, Xue Bin Peng e Koushil Sreenath , os pesquisadores que realizaram o estudo, disseram ao TechXplore. “O goleiro é uma tarefa interessante, mas desafiadora, que exige que o robô reaja à bola em movimento rápido, às vezes voando no ar, e a intercepte usando manobras dinâmicas em um período de tempo muito curto (geralmente em um segundo). , também podemos obter informações sobre como criar robôs com pernas inteligentes e dinâmicos.”
O objetivo principal do trabalho recente de Huang e seus colegas era criar um goleiro robô de quatro patas que pudesse aperfeiçoar suas habilidades enquanto joga, assim como um goleiro humano faria. Para fazer isso, os pesquisadores desenvolveram um modelo de aprendizado por reforço que treina o robô por meio de um processo de tentativa e erro, em vez de uma estratégia fixa de engenharia humana.
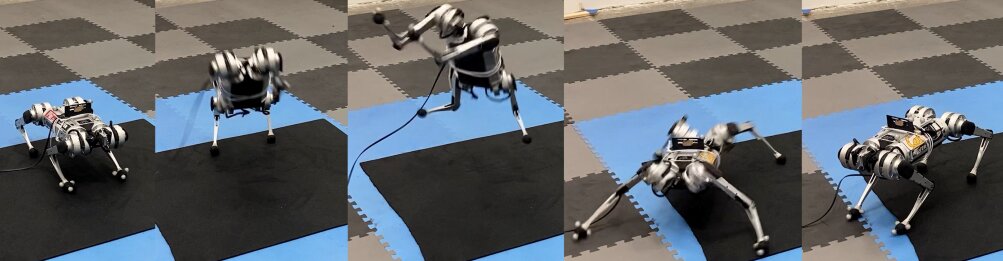
“O robô primeiro aprende diferentes políticas de controle de locomoção para realizar habilidades distintas, como desviar, mergulhar e pular, enquanto rastreia trajetórias aleatórias para os dedos do robô”, explicaram os pesquisadores. “Com base nessas políticas de controle, o robô aprende uma política de planejamento de alto nível para selecionar uma habilidade e movimento ideais para interceptar a bola depois de examinar a posição da bola detectada e os estados do robô”.
Os pesquisadores treinaram seu modelo de aprendizado por reforço em uma série de simulações de jogos de futebol. Posteriormente, eles implantaram as políticas aprendidas no Mini Cheetah, um robô quadrúpede real desenvolvido no Massachusetts Institute of Technology (MIT) e testaram seu desempenho no mundo real.
A estrutura de aprendizado por reforço criada por Huang e seus colegas melhorou bastante as habilidades do robô Mini Cheetah como goleiro de futebol. Nos testes do mundo real da equipe, o robô conseguiu salvar 87,5% de 40 disparos aleatórios.

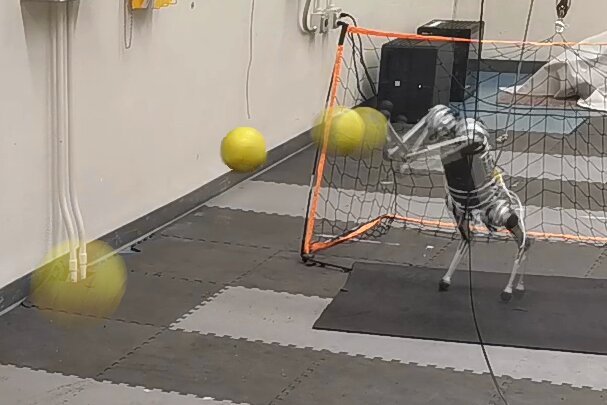

“Acho que o mais legal do nosso trabalho é que, usando nosso método proposto, o robô quadrúpede Mini Cheetah é capaz de realizar habilidades de locomoção muito dinâmicas e ágeis, como saltos e mergulhos, além de habilidades de manipulação rápidas e precisas, como como empurrar a bola para longe usando suas pernas oscilantes em um período muito curto de tempo”, disseram os pesquisadores. “Isso realmente ultrapassa os limites da locomoção com pernas, mostrando que a perna também pode ser um manipulador, assim como pode ser para os humanos”.
No futuro, o modelo de aprendizado por reforço criado por essa equipe de pesquisadores poderá ser usado para melhorar o desempenho de robôs projetados para participar da RoboCup e outras competições de futebol robótico. Além disso, seu modelo pode ser usado para melhorar a agilidade e as habilidades físicas de robôs quadrúpedes projetados para realizar tarefas totalmente diferentes, como missões de busca e salvamento.
“Esperamos poder permitir que robôs quadrúpedes compitam com jogadores de futebol humanos em um futuro próximo”, acrescentaram os pesquisadores. “Os robôs precisam realizar uma variedade maior de movimentos dinâmicos e ágeis e obter mais inteligência no jogo de futebol.”
Publicado em 27/10/2022 08h20
Artigo original:
Estudo original: