



À medida que os robôs se tornam cada vez mais avançados, eles são treinados para realizar uma ampla variedade de tarefas. Alguns roboticistas têm explorado especificamente o potencial dos sistemas robóticos que podem montar itens sem muita supervisão humana, pois isso poderia acelerar significativamente os processos industriais e de produção.
Pesquisadores do Instituto de Ciência e Tecnologia de Nara (NAIST) criaram recentemente um soft jig que pode ser usado para melhorar o desempenho de robôs de montagem de uso geral. Este gabarito, apresentado em um artigo apresentado na Conferência Internacional IEEE sobre Robótica e Automação (ICRA), é baseado na garra de bloqueio universal, um sistema criado por roboticistas da Universidade de Chicago Cornell e da iRobot.
“Nosso soft jig é inspirado por uma pinça robótica soft chamada jamming gripper, que tem recebido muita atenção dos pesquisadores de robótica”, disse Takuya Kiyokawa, um dos pesquisadores que realizou o estudo, ao TechXplore. “O principal objetivo do nosso estudo foi melhorar a flexibilidade dos acessórios para as peças de montagem manuseadas pela pinça.”
Em última análise, Kiyokawa e seus colegas gostariam de desenvolver um sistema de montagem robótico genérico que pudesse acelerar os processos de produção de baixo volume. O soft jig que eles criaram pode ser um primeiro passo nessa direção, pois eles descobriram que poderia melhorar a capacidade da garra robótica desenvolvida anteriormente para montar itens diferentes.
Takuya Kiyokawa, Tatsuya Sakuma, Jun Takamatsu, and Tsukasa Ogasawara
Preprint: https://arxiv.org/abs/2010.10843
Created by Takuya Kiyokawa
Personal page: https://takuya-ki.github.io/
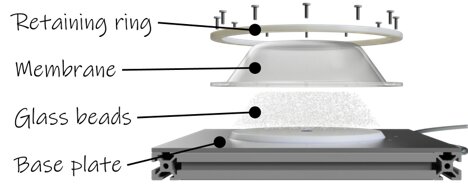
“A principal vantagem de nosso soft jig é sua estrutura de hardware, porque a membrana de silicone, incluindo as contas de vidro, permite a transição de bloqueio e dá a flexibilidade como fixação para peças de montagem complicadas”, explicou Kiyokawa.
O soft jig desenvolvido pelos pesquisadores é essencialmente um saco cheio de contas de vidro, que é coberto por uma membrana de silicone maleável. As contas de vidro permitem realizar transições de bloqueio ideais, enquanto a membrana de silicone melhora a fricção e a flexibilidade, permitindo que o gabarito agarre melhor as peças individuais e as mantenha paradas.
Em seu artigo, Kiyokawa e seus colegas também descrevem um método que pode ser usado para configurar a capacidade de seu soft jig de manter fixas partes dos itens manipulados pela pinça. Para configurar efetivamente o jog, este método considera uma série de fatores, incluindo relações de contato, direções alcançáveis e o centro de gravidade das peças fixadas ao gabarito.
“Nosso estudo demonstra a possibilidade de segurar peças de hardware fixas mesmo ao aplicar forças externas a elas”, disse Kiyokawa. “Se nossos estudos futuros forem bem, acreditamos que o gabarito macio romperá a limitação de flexibilidade dos gabaritos de metal de uso geral.”
Os pesquisadores avaliaram o soft jig que desenvolveram em uma série de testes, avaliando especificamente seu desempenho de fixação e versatilidade (ou seja, sua capacidade de manusear peças de diferentes formas e tamanhos). Os resultados obtidos nesses testes foram altamente promissores, sugerindo que o gabarito poderia eventualmente ser usado para criar robôs que podem completar tarefas de montagem com mais eficiência.
“Já aprimoramos o gabarito suave, de modo que o sistema de gabarito possa estimar as posições das peças fixadas no gabarito”, disse Kiyokawa. “As poses das peças podem ser estimadas rastreando os marcadores fixados na superfície interna do gabarito de câmeras colocadas sob ele. Agora, planejamos desenvolver algoritmos de planejamento de movimento para alcançar operações de montagem flexíveis, mas ‘precisas’ que requerem alta precisão de montagem, utilizando nosso soft jig. “
Publicado em 11/12/2021 08h48
Artigo original:
Estudo original: