


Pesquisadores da Tecnologico de Monterrey, no México, criaram recentemente um braço robótico de baixo custo que pode aprimorar o ensino de robótica online, permitindo que os professores demonstrem remotamente os conceitos teóricos explicados durante as aulas. Este braço robótico, apresentado em um artigo publicado no Hardware X, é totalmente de código aberto e pode ser facilmente montado por todos os professores e educadores em todo o mundo.
“Este projeto começou durante o surto COVID-19 em março de 2020”, disse Victor H. Benitez, um dos pesquisadores que realizaram o estudo, à TechXplore. “Depois de aprender sobre cinemática direta e inversa e suas aplicações, dois alunos, Rodrigo Symonds e David Elguezabal, vieram até mim com a ideia de criar um braço robótico de dois links com recursos de IoT como um projeto para sua aula de robótica.”
Benitez e seus alunos se propuseram a criar um robô acessível que pudesse ser montado fora dos ambientes de laboratório (ou seja, sem a necessidade de ferramentas e equipamentos avançados), mas que pudesse ser usado para mostrar conceitos complexos de robótica em um ambiente físico. Um exemplo desses conceitos é a cinemática, um processo matemático que sustenta os movimentos dos robôs que pode ser difícil para os alunos entenderem quando é apenas explicado teoricamente a eles (ou seja, sem qualquer demonstração física).
“Nosso braço robótico usa um processo matemático chamado cinemática”, explicou Benitez. “A cinemática direta consiste em usar matrizes com os valores de ângulo da junta desejados para determinar a posição do efetor final. Usamos a convenção de Denavit-Hartenberg para implementar esse comportamento no robô. Por outro lado, a cinemática indireta são principalmente equações trigonométricas que criam relações entre comprimentos e ângulos para calcular como as articulações do braço precisam se mover para que o efetor final alcance um determinado ponto ou trajetória no espaço. ”
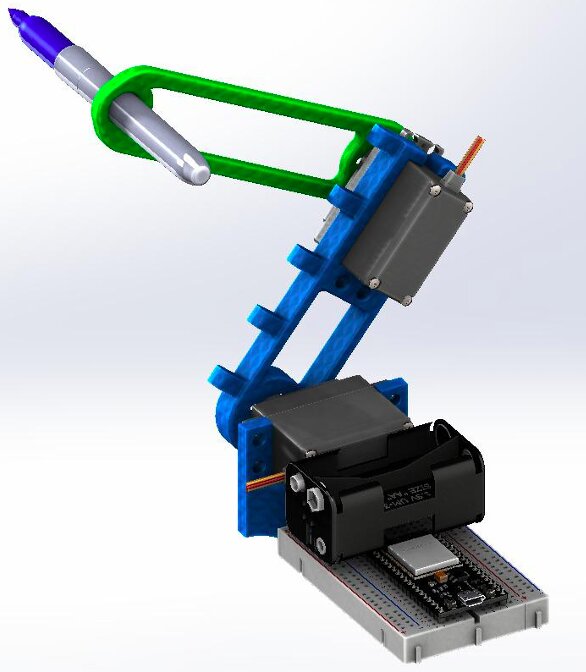
A trajetória que um braço robótico precisa seguir para mover um efetor final (ou seja, um objeto de interesse) para um local específico é determinada por coordenadas específicas ou funções paramétricas. Nesse contexto, o efetor final pode ser qualquer objeto que o braço está tentando mover, como um marcador, um laser ou mesmo uma pinça robótica.

Em contraste com outros braços robóticos existentes, este braço tem baixos custos de produção. Ele também pode ser conectado a fontes WiFi e pode ser controlado remotamente por meio de um aplicativo online. Isso o torna ideal para aprendizagem remota, pois permite que professores e alunos que estão se comunicando pela Internet experimentem o mesmo braço. Além disso, o programa em que se baseia permite que os usuários acessem facilmente todos os comandos e parâmetros por trás dos movimentos do braço, o que pode apoiar ainda mais o aprendizado e aprimorar a compreensão de cada aluno dos processos que sustentam o comportamento de um robô.
O braço robótico tem quatro componentes principais: uma estrutura de braço eletromecânico, um sistema de controle, um módulo de comunicação wi-fi e uma interface homem-máquina. É totalmente open source e modificável, o que significa que educadores de todo o mundo podem acessar seu design e adaptá-lo de acordo com suas necessidades específicas. Usando este braço, os professores podem demonstrar muitos conceitos de robótica, mas também tocar em outros tópicos relacionados à matemática, impressão 3-D, ciência da computação e programação.
“Nosso robô foi projetado principalmente para fins educacionais”, disse Benitez. “Os educadores podem usar e modificar facilmente o braço robótico para ensinar aos alunos as aplicações dos diversos tópicos mencionados em suas aulas, mesmo quando enfrentam as dificuldades da educação online.”
O trabalho recente de Benitez e seus alunos mostra que é possível construir um robô útil e eficiente usando atuadores e componentes eletrônicos acessíveis. Quando os pesquisadores avaliaram seu braço robótico, eles descobriram que é uma ferramenta altamente eficaz para demonstrar conceitos teóricos, tanto em ambientes de laboratório quanto remotamente. Educadores de todo o mundo logo poderão começar a usá-lo para ensinar alunos online de maneiras mais envolventes, fornecendo demonstrações tangíveis de tópicos teóricos abordados durante as aulas.
“Atualmente, uma equipe de alunos está desenvolvendo uma segunda versão deste robô com nossa ajuda e recomendações”, disse Benitez. “Eles irão implementar atualizações no robô e melhorar o desempenho e a confiabilidade do projeto original sem sacrificar suas vantagens (preço baixo, integração IoT, finalidade educacional). Nosso objetivo é um equilíbrio entre preço e utilidade para permitir que este projeto seja aplicado em muitas maneiras diferentes. “
Publicado em 16/12/2020 00h10
Artigo original:
Estudo original: