



Pesquisadores do Grupo de Engenharia de Sistemas Integrados da Universidade de Málaga (UMA) desenvolveram um robô de telepresença que permite que pessoas que sofrem de COVID-19 falem com seus entes queridos.
Embora esta equipa científica trabalhe em robótica social há mais de uma década no âmbito do projeto ROSI, dotou este novo desenho de funções adicionais de forma a adaptá-lo às necessidades pandémicas, com o objetivo de facilitar o trabalho dos profissionais de enfermagem lares e hospitais.
?Permitimos que pessoas isoladas em uma sala pudessem fazer uma videochamada com parentes e amigos sem riscos e independentemente de sua capacidade de utilizar as novas tecnologias?, diz um dos principais pesquisadores deste projeto, Juan Pedro Bandera, professor do Escola de Telecomunicações.
A pesquisadora explica que o procedimento seria o seguinte: um amigo ou parente reserva uma hora para uma videochamada por meio de uma interface web simples; o robô inicializa de forma autônoma e vai até o balcão para ser desinfetado, conforme protocolo; em seguida, vai até a sala e inicia a videochamada no horário agendado; ao terminar, é desinfetado novamente e depois vai para o seu local de repouso.
Com pouco mais de um metro de altura, corpo cilíndrico ou pedestal, este robô “made in UMA” possui habilidades expressivas simples, capacidade de comunicação audiovisual e, além disso, é capaz de se movimentar com autonomia em cenários da vida cotidiana.
Desta forma, anunciar eventos diários em áreas comuns de lares de idosos como um “pregoeiro” ou oferecer aos idosos a possibilidade de se divertir, compartilhar e visualizar fotos são outras funções deste robô.
Dispositivo eficaz e socialmente aceito
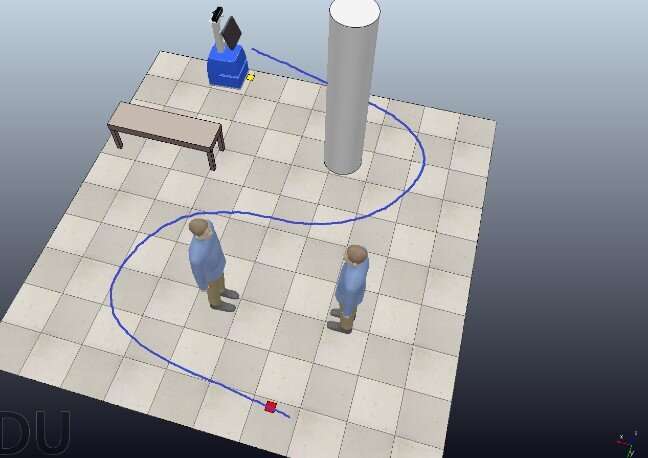
?Um robô social que cruze continuamente entre duas pessoas conversando, que se aproxime muito delas ao se movimentar, que se mova muito rápido ou abruptamente ou pare em um corredor bloqueando seu caminho não será aceito e, portanto, não será útil?. diz Juan Pedro Bandera Rubio, coordenador do projeto.
Com base nessa abordagem, os pesquisadores também realizaram dois experimentos relacionados à navegação social dentro deste projeto. No primeiro, eles estudaram o consumo de energia em um robô real que se move seguindo trajetórias com diferentes fatores de suavidade, uma vez que a suavidade é um dos parâmetros mais comumente usados para descrever o movimento de um robô. No segundo experimento, eles analisaram opiniões e impressões coletadas de diferentes participantes após apresentarem situações simuladas onde um robô se move em torno de determinados cenários virtuais, aplicando, novamente, trajetórias com diferentes fatores de suavidade.
Os resultados desses experimentos mostram que, em termos gerais, caminhos mais suaves diminuem o consumo de energia e aumentam a aceitabilidade social. No entanto, eles também mostram que outros fatores críticos precisam ser considerados, como manter uma distância adequada das pessoas: “Muito provavelmente um robô social não deve tentar se mover como os humanos. O robô terá que manter uma distância maior e evitar movimentos bruscos curvas e mudanças de velocidade de forma mais restrita, além de trajetórias erráticas cujo destino é difícil de prever, pois todos esses aspectos, embora atendendo às condições de segurança, eficiência e suavidade, reduzirão consideravelmente a aceitação do robô ?, destaca Bandera Rubio. .
Até o momento, a pandemia não permitiu a chegada dos robôs a asilos e hospitais, mas estudos-piloto bem-sucedidos foram realizados. Além disso, o projeto de transferência europeu “DIH-HERO”, focado na utilização destes robôs sociais assistentes para realizar videochamadas e com base no trabalho realizado no âmbito do projeto ROSI, acaba de iniciar e, nos próximos meses, irá possibilitar o implantação de robôs nesses espaços compartilhados.
Publicado em 24/05/2021 01h58
Artigo original:
Estudo original: