


Os robôs macios são mais adequados a certas situações do que os robôs tradicionais. Ao interagir com um ambiente, humanos ou outros seres vivos, a suavidade inerente construída na estrutura de um robô feito de borracha, por exemplo, é mais segura do que o metal. Robôs leves também são melhores em interagir com um ambiente instável ou incerto – se um robô entrar em contato com um objeto imprevisto, ele pode simplesmente se deformar no objeto em vez de bater.
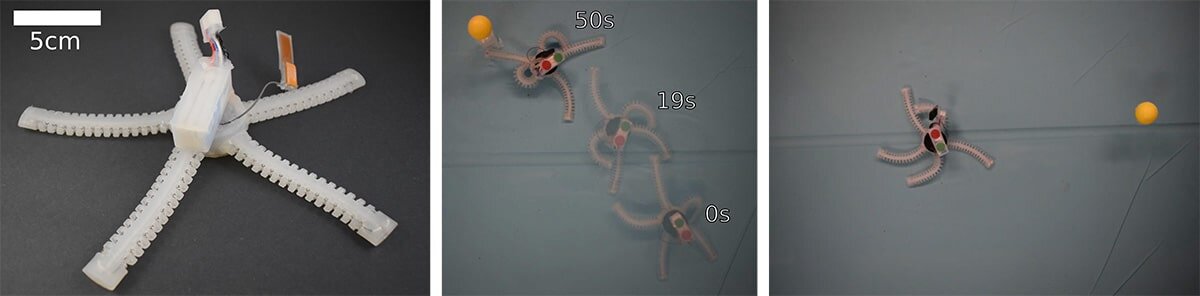
Essa deformabilidade flui diretamente para o trabalho de Zach Patterson no Laboratório de Máquinas Soft da Carnegie Mellon University. Um Ph.D. candidato em engenharia mecânica, Patterson criou um robô macio inspirado na estrela frágil, um tipo de estrela do mar que é relativamente rápida e ágil. O robô, chamado PATRICK, é o primeiro robô macio submarino móvel e sem amarras.
“É um robô que rasteja ao longo do fundo do mar e parte do valor da plataforma é que os membros são feitos de borracha”, disse Patterson, que colaborou com Keene Chin, um Ph.D. candidato em robótica e Andrew Sabelhaus, um associado de pesquisa de pós-doutorado em engenharia mecânica. “Pode facilmente deformar-se com a incerteza do meio ambiente.”
Os membros do PATRICK são feitos de vigas de borracha com quatro fios enrolados embutidos feitos de um metal chamado liga com memória de forma (SMA), especificamente uma composição de níquel-titânio. A liga sofre uma mudança de fase com uma mudança na temperatura; depois de ultrapassar esse limite de temperatura em que sofre a mudança de fase, ele se transforma de volta à forma lembrada. À temperatura ambiente, a fase “não lembrada”, a liga é muito flexível, dando aos membros de PATRICK propriedades flexíveis e deformáveis. Para fazer o robô se mover, os pesquisadores o atingiram com corrente elétrica, fazendo com que os fios esquentassem além da temperatura de transição e permitindo que os membros se contraíssem e se movessem em diferentes direções.
Patterson e seus colegas projetaram o PATRICK com alguns objetivos em mente. Um dos objetivos era fazer um robô não amarrado – como em, um robô que não está conectado a um fio que leva a energia e eletrônica off-board.
“Queremos colocar a potência e os componentes eletrônicos a bordo com os robôs; esse era um objetivo central aqui”, disse Patterson. “Essa é uma etapa nada trivial e muda a maneira como você deve projetar e construir o robô.”
Patterson também buscou desenvolver uma infraestrutura eletrônica e computacional para o robô, o que é comum na robótica tradicional. Na robótica leve, os pesquisadores normalmente estão mais focados no projeto físico e na capacidade de demonstrar a funcionalidade, e não constroem uma infraestrutura computacional madura em torno do robô que projetaram.
Os pesquisadores construíram uma infraestrutura computacional para o PATRICK usando o Robotics Operating System (ROS), um pacote de software de computador para desenvolvimento de robótica. Com o sistema, a equipe pode ditar diferentes tarefas para PATRICK realizar, como mover-se debaixo d’água para alcançar uma bola. Existem poucos soft robôs sem amarras, e ainda menos robôs que podem rastejar debaixo d’água, mas Patterson considera a incorporação dessa infraestrutura a maior contribuição da PATRICK no campo da soft robótica.
“Essa infraestrutura computacional nos permite fazer coisas como chegar a um ponto comandado no espaço. Isso é único, pelo que sabemos, na literatura de robótica leve”, disse ele. “Queríamos ir além de demonstrações únicas ou software ad hoc e criar uma plataforma mais flexível que pudéssemos usar para testar diferentes algoritmos de controle e planejamento e diferentes sensores.”
Patterson vê esta pesquisa como um catalisador para pesquisas adicionais no Soft Machines Lab, particularmente para explorar a teoria de controle e algoritmos de controle no contexto da robótica soft. Em relação ao futuro de PATRICK, Patterson espera usar o robô bioinspirado em estudos comparativos com estrelas frágeis da vida real, criando um ciclo de feedback de informações em que eles podem usar o robô para entender melhor estrelas frágeis e, em seguida, melhorar o design do robô.
Publicado em 18/02/2021 11h54
Artigo original:
Estudo original: