


Uma equipe internacional liderada por pesquisadores do RIKEN Cluster for Pioneering Research (CPR) projetou um sistema para criar baratas ciborgues controladas remotamente, equipado com um pequeno módulo de controle sem fio que é alimentado por uma bateria recarregável conectada a uma célula solar. Apesar dos dispositivos mecânicos, a eletrônica ultrafina e os materiais flexíveis permitem que os insetos se movimentem livremente. Essas conquistas, relatadas na revista científica npj Flexible Electronics em 5 de setembro, ajudarão a tornar o uso de insetos ciborgues uma realidade prática.
Pesquisadores têm tentado projetar insetos ciborgues – parte inseto, parte máquina – para ajudar a inspecionar áreas perigosas ou monitorar o meio ambiente. No entanto, para que o uso de insetos ciborgues seja prático, os manipuladores devem ser capazes de controlá-los remotamente por longos períodos de tempo. Isso requer o controle sem fio de seus segmentos de perna, alimentado por uma pequena bateria recarregável. Manter a bateria carregada adequadamente é fundamental – ninguém quer uma equipe de baratas ciborgues de repente fora de controle perambulando por aí. Embora seja possível construir estações de ancoragem para recarregar a bateria, a necessidade de retornar e recarregar pode atrapalhar missões sensíveis ao tempo. Portanto, a melhor solução é incluir uma célula solar integrada que possa garantir continuamente que a bateria permaneça carregada.
Tudo isso é mais fácil dizer do que fazer. Para integrar com sucesso esses dispositivos em uma barata que possui área de superfície limitada, a equipe de pesquisa exigiu que a equipe de pesquisa desenvolvesse uma mochila especial, módulos de células solares orgânicas ultrafinas e um sistema de adesão que mantém o maquinário conectado por longos períodos de tempo, além de permitir movimentos naturais.
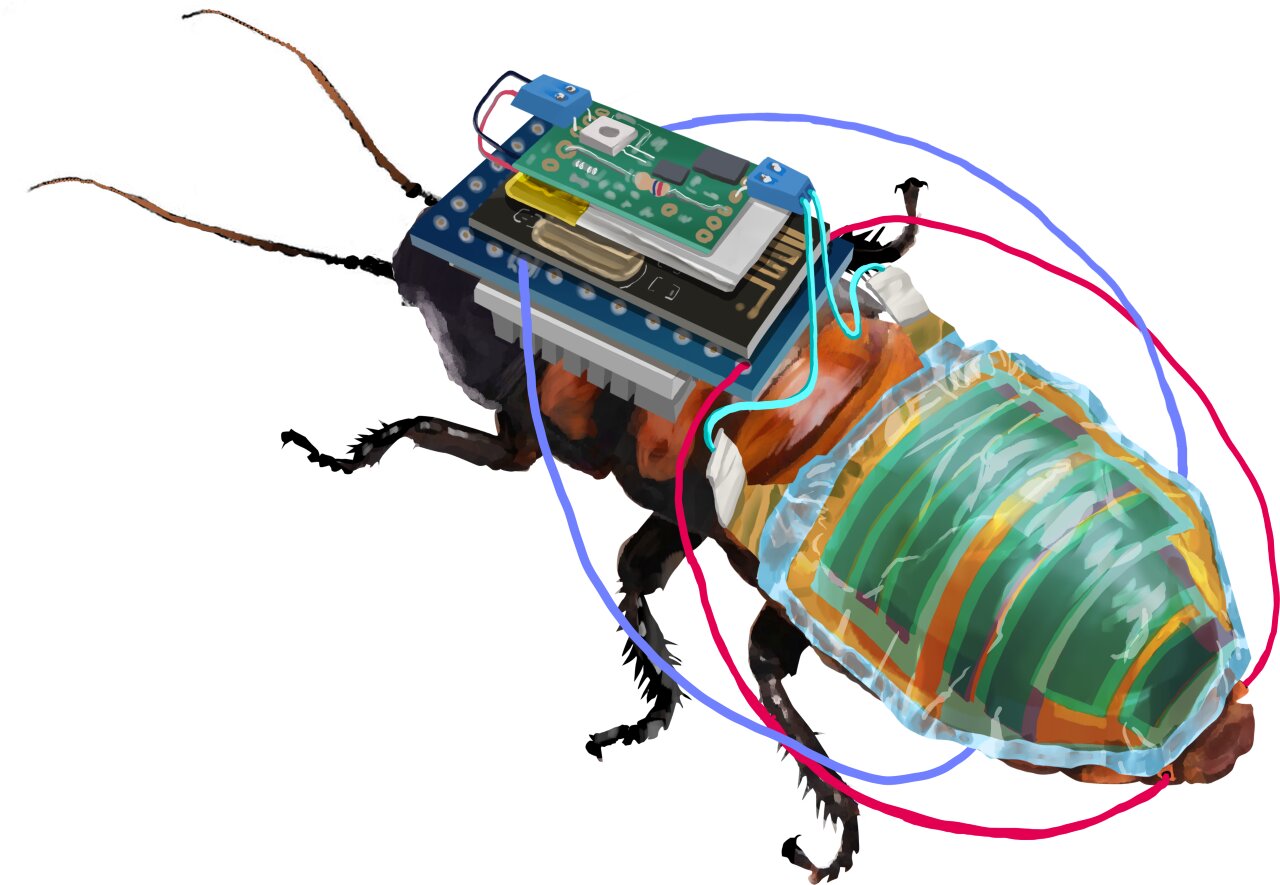
Liderada por Kenjiro Fukuda, RIKEN CPR, a equipe experimentou baratas de Madagascar, que têm aproximadamente 6 cm de comprimento. Eles prenderam o módulo de controle de perna sem fio e a bateria de polímero de lítio ao topo do inseto no tórax usando uma mochila especialmente projetada, que foi modelada após o corpo de uma barata modelo. A mochila foi impressa em 3D com um polímero elástico e se conformou perfeitamente à superfície curva da barata, permitindo que o dispositivo eletrônico rígido fosse montado de forma estável no tórax por mais de um mês.
O módulo de células solares orgânicas ultrafinas de 0,004 mm de espessura foi montado no lado dorsal do abdome. “O módulo de célula solar orgânica ultrafina montada no corpo atinge uma potência de 17,2 mW, que é mais de 50 vezes maior do que a potência dos atuais dispositivos de coleta de energia de última geração em insetos vivos”, de acordo com Fukuda.
A célula solar orgânica ultrafina e flexível, e a forma como foi fixada ao inseto, mostrou-se necessária para garantir a liberdade de movimento. Depois de examinar cuidadosamente os movimentos naturais da barata, os pesquisadores perceberam que o abdômen muda de forma e partes do exoesqueleto se sobrepõem. Para acomodar isso, eles intercalaram seções adesivas e não adesivas nos filmes, o que permitiu que eles se dobrassem, mas também permanecessem presos. Quando os filmes de células solares mais espessos foram testados, ou quando os filmes foram unidos uniformemente, as baratas levaram o dobro do tempo para percorrer a mesma distância e tiveram dificuldade em se endireitar quando estavam de costas.
Uma vez que esses componentes foram integrados às baratas, juntamente com fios que estimulam os segmentos das pernas, os novos ciborgues foram testados. A bateria foi carregada com pseudo-sol por 30 minutos, e os animais foram feitos para virar à esquerda e à direita usando o controle remoto sem fio.
“Considerando a deformação do tórax e do abdômen durante a locomoção básica, um sistema eletrônico híbrido de elementos rígidos e flexíveis no tórax e dispositivos ultramacios no abdômen parece ser um projeto eficaz para baratas ciborgues”, diz Fukuda. “Além disso, como a deformação abdominal não é exclusiva das baratas, nossa estratégia pode ser adaptada a outros insetos como besouros, ou talvez até insetos voadores como cigarras no futuro”.
Publicado em 06/09/2022 10h02
Artigo original:
Estudo original: