


Vimos robôs alçarem voo, mergulhar sob as ondas e realizar todos os tipos de manobras em terra. Agora, pesquisadores da UC Santa Barbara e do Georgia Institute of Technology estão explorando uma nova fronteira: o solo sob nossos pés. Pegando dicas de plantas e animais que evoluíram para navegar por espaços subterrâneos, eles desenvolveram um robô macio, rápido e controlável que pode cavar na areia. A tecnologia não só permite novas aplicações para movimentos subterrâneos rápidos, precisos e minimamente invasivos, mas também estabelece as bases mecânicas para novos tipos de robôs.
“Os maiores desafios de se mover pelo solo são simplesmente as forças envolvidas”, disse Nicholas Naclerio, estudante de graduação pesquisador no laboratório da UC Santa Barbara, professor de engenharia mecânica Elliot Hawkes e autor principal de um artigo na capa da revista Science Robotics . Enquanto o ar e a água oferecem pouca resistência aos objetos que se movem através deles, explicou ele, o mundo subterrâneo é outra história.
“Se você está tentando se mover através do solo, você tem que empurrar o solo, areia ou outro meio para fora do caminho”, disse Naclerio.
Felizmente, o mundo natural fornece vários exemplos de navegação subterrânea na forma de plantas e fungos que constroem redes subterrâneas e animais que dominam a capacidade de túneis diretamente através de meios granulares. Obter uma compreensão mecânica de como as plantas e animais dominaram a navegação subterrânea abre muitas possibilidades para a ciência e a tecnologia, de acordo com Daniel Goldman, professor de física da família Dunn na Georgia Tech.
“A descoberta de princípios pelos quais diversos organismos nadam e escavam com sucesso em meios granulares pode levar ao desenvolvimento de novos tipos de mecanismos e robôs que podem tirar vantagem de tais princípios”, disse ele. “E, reciprocamente, o desenvolvimento de um robô com tais capacidades pode inspirar novos estudos com animais, bem como apontar para novos fenômenos na física de substratos granulares.”
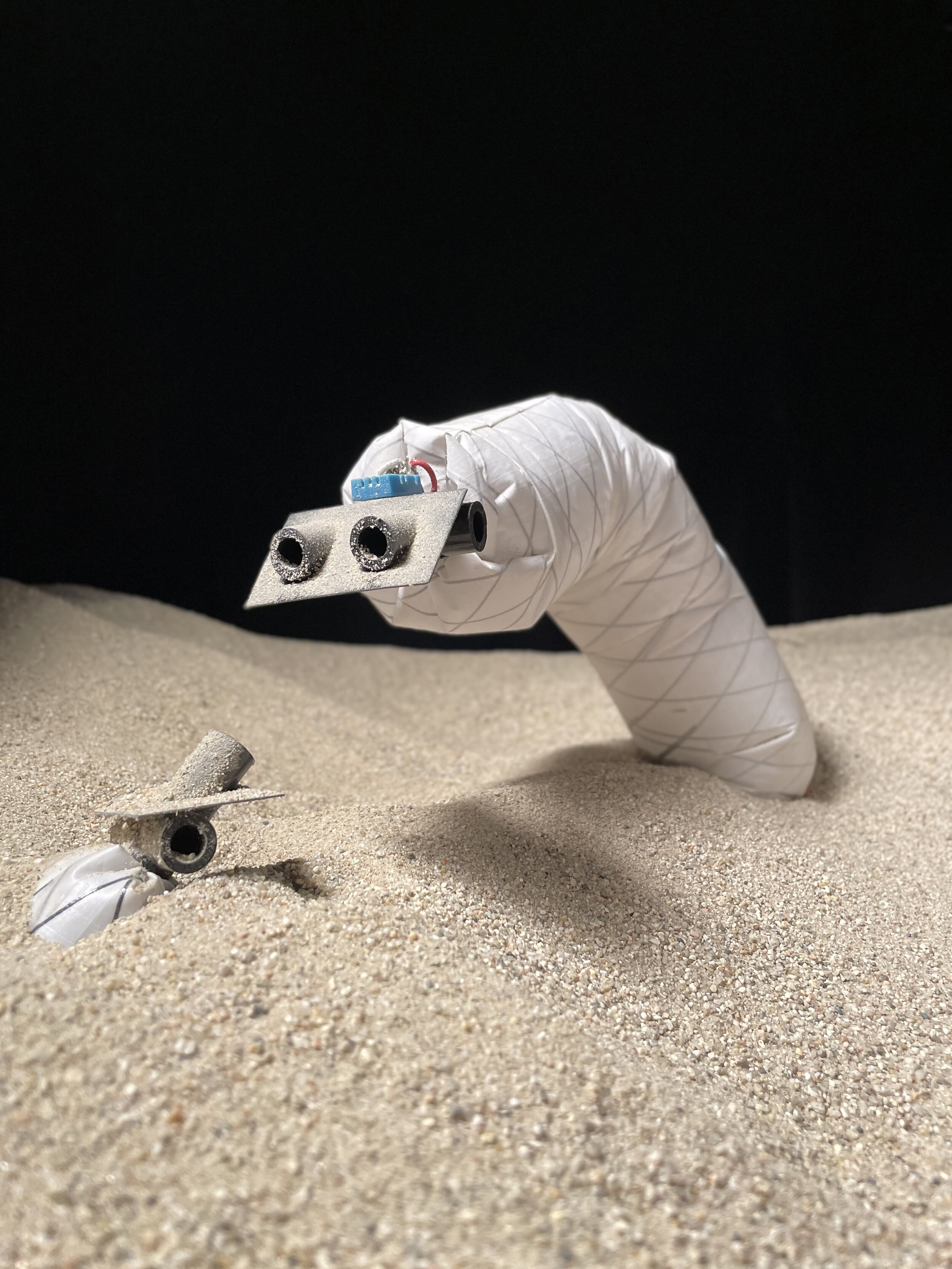
Os pesquisadores tiveram uma boa vantagem inicial com um robô macio parecido com uma videira projetado no Laboratório Hawkes que imita as plantas e a maneira como elas navegam crescendo a partir de suas pontas, enquanto o resto do corpo permanece estacionário. No cenário subterrâneo, a extensão da ponta, segundo os pesquisadores, continua resistindo às forças baixas e localizadas apenas na ponta crescente; se todo o corpo se movesse à medida que crescia, o atrito em toda a superfície aumentaria à medida que mais do robô entrasse na areia até que o robô não pudesse mais se mover.
Animais cavando, por sua vez, servem de inspiração para uma estratégia adicional chamada fluidização granular, que suspende as partículas em um estado fluido e permite ao animal superar o alto nível de resistência apresentado pela areia ou solo solto. O polvo da areia do sul, por exemplo, expele um jato de água no solo e usa seus braços para puxar-se para a areia temporariamente solta. Essa habilidade chegou ao robô dos pesquisadores na forma de um dispositivo de fluxo baseado na ponta que lança ar na região logo antes da extremidade crescente, permitindo que ele se mova para essa área.
“O maior desafio que encontramos e o que demorou mais para ser resolvido foi quando mudamos para a escavação horizontal, nossos robôs sempre apareciam”, disse Naclerio. Enquanto gases ou líquidos fluem uniformemente sobre e sob um objeto simétrico em movimento, ele explicou, na areia fluidificada, a distribuição de forças não é tão equilibrada e cria uma força de sustentação significativa para o robô que viaja horizontalmente. “É muito mais fácil empurrar a areia para cima e para fora do caminho do que compactá-la.”
Para entender o comportamento do robô e a física amplamente inexplorada das intrusões auxiliadas por ar, a equipe realizou medições de arrasto e sustentação como resultado de diferentes ângulos de fluxo de ar da ponta de uma haste sólida enfiada horizontalmente na areia.
“A resposta da força de atrito em materiais granulares difere muito daquela dos fluidos newtonianos, pois a intrusão na areia pode compactar e sobrecarregar grandes áreas de terreno na direção do movimento devido ao alto atrito”, disse Andras Karsai, um estudante pesquisador graduado no laboratório de Goldman. “Para mitigar isso, um fluido de baixa densidade que levanta e empurra os grãos para longe de um intruso geralmente reduz o estresse de fricção que precisa superar.”
Ao contrário do gás ou líquido, onde um jato de fluido descendente criaria sustentação para o objeto em movimento, na areia o fluxo de ar descendente reduziu as forças de sustentação e escavou a areia abaixo da ponta crescente do robô. Isso, combinado com a inspiração do lagarto sandfish, cuja cabeça em forma de cunha favorece o movimento para baixo, permitiu aos pesquisadores modular as forças de resistência e manter o robô se movendo horizontalmente sem sair da areia.
Um pequeno robô exploratório e macio como este tem uma variedade de aplicações onde é necessária escavação rasa em meios granulares secos, como amostragem de solo, instalação subterrânea de utilidades e controle de erosão. A extensão da ponta permite mudanças de direção, ao mesmo tempo que permite que o corpo do robô module o quão firmemente ancorado está no meio – controle que pode se tornar útil para exploração em ambientes de baixa gravidade. Na verdade, a equipe está trabalhando em um projeto com a NASA para desenvolver escavações para a lua ou até corpos mais distantes, como Enceladus, uma lua de Júpiter.
“Acreditamos que a escavação tem o potencial de abrir novos caminhos e permitir novos recursos para a robótica extraterrestre”, disse Hawkes.
Publicado em 17/06/2021 12h05
Artigo original:
Estudo original: