


Toda uma geração de robôs de preensão foi desenvolvida usando um conceito de design originalmente conhecido das barbatanas de peixe. Uma equipe de pesquisa internacional da Biomecânica, com a participação da Universidade de Kiel (CAU), liderada pela Universidade do Sul da Dinamarca (SDU), agora otimizou essa função de preensão inspirada em insetos e desafiou esse padrão em robótica. Eles também o transferiram dos elementos da mão para o pé pela primeira vez. Isso não apenas permitiria que os robôs se agarrassem melhor com menos energia, mas também andassem melhor em superfícies irregulares. As descobertas foram publicadas na revista Advanced Intelligent Systems e como matéria de capa da edição impressa atual.
Bom contato: Bush-grilo serve de modelo
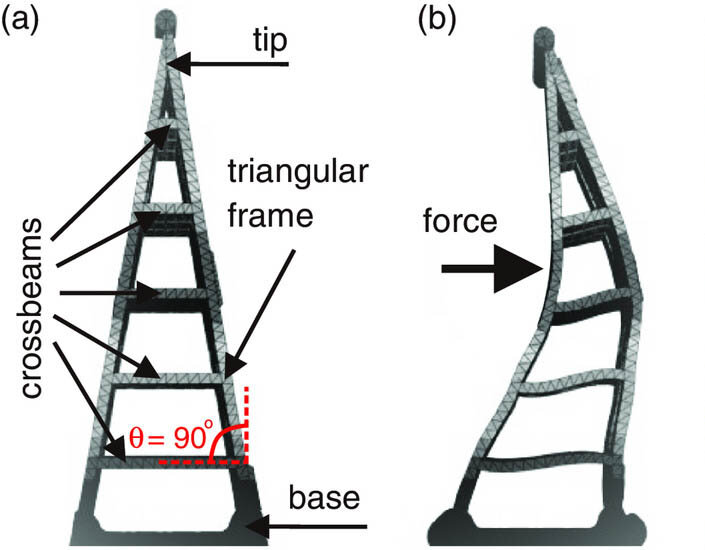
Muitos robôs podem prender firmemente os objetos-alvo com seus elementos de preensão sem muita pressão. As construções inteligentes especializadas deformam-se para se adaptarem ao contorno da superfície dos objetos. Isso é baseado no chamado efeito Fin-Ray. “É fascinante: se você pressionar um lado de um triângulo afiado, ele não se afasta de você – como você poderia esperar – mas em sua direção. Ele não cede à direção da pressão, mas se dobra na direção de onde vem a pressão”, diz o professor de zoologia Stanislav Gorb, do CAU, descrevendo o fenômeno. Há quase 25 anos, o biólogo alemão Leif Kniese observou o efeito pela primeira vez nas barbatanas dos peixes, que se adaptam de forma otimizada a diferentes condições de fluxo. Ele descobriu que a razão para isso era a estrutura interna da barbatana caudal.
Vigas cruzadas semelhantes também podem ser encontradas nos elementos do pé de muitos insetos. Eles os ajudam a se adaptar melhor às superfícies e a se fixar com segurança. “Essa é uma das nossas principais questões de pesquisa: como os insetos podem se prender tão bem às superfícies sem usar muita força? Como eles criam a área de contato necessária?” resume Gorb o foco de seu grupo de pesquisa “Morfologia Funcional e Biomecânica” na Universidade de Kiel. Juntamente com sua equipe de Kiel, ele examinou vários pés de insetos, como os do grilo Tettigonia viridissima. Enquanto as vigas cruzadas nas garras “Fin-Ray” são presas em um ângulo de 90 graus, o ângulo das almofadas de fixação dos insetos era diferente.
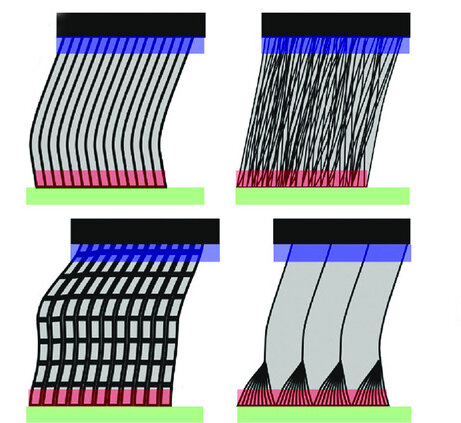
Para o efeito Fin-Ray, investigações detalhadas sobre o efeito de diferentes ângulos de travessa ainda não foram realizadas. Os pesquisadores de Kiel agora usaram simulações de computador para calcular as forças que agiriam sobre os elementos de preensão e seus objetos-alvo em cada caso. Eles verificaram seus resultados usando experimentos e medições de força com modelos estruturais da impressora 3D.
Nova forma de produzir tecnologia de preensão?
“Ao mudar para ângulos menores, o dispositivo se dobra mais facilmente em torno de objetos para fornecer uma fixação mais forte que requer menos força”, disse Gorb. “Isso significa que podemos economizar cerca de 20% da energia do robô e adotar uma abordagem mais suave”, disse o primeiro autor Poramate Manoonpong. “Podemos usar o mecanismo de garra para uma garra robótica que pode lidar com itens muito delicados e frágeis, como alimentos, e aplicar significativamente menos força ou energia. Isso pode ter um impacto na maneira como toda a indústria fabrica garras robóticas.” Manoonpong é professor de biorrobótica da SDU e do Instituto Vidyasirimedhi de Ciência e Tecnologia (VISTEC) na Tailândia. Muitas idéias conjuntas já surgiram há alguns anos, quando Manoonpong passou um semestre em Kiel, a convite de Gorb, como parte da Cátedra Visitante Escandinava do CAU.
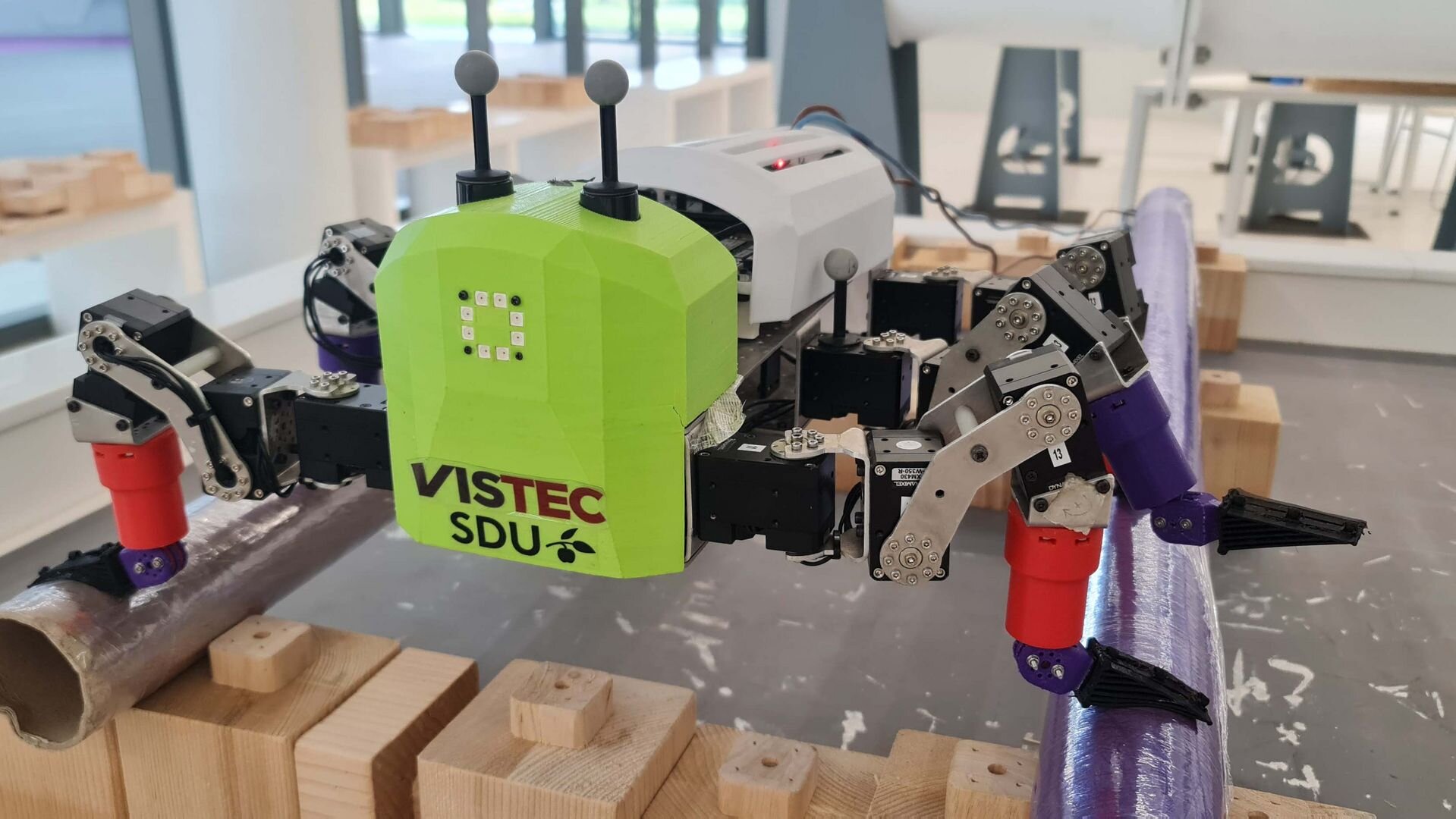
Finalmente, a parte de Kiel da equipe de pesquisa testou o que aconteceria se eles aplicassem essa função de preensão aprimorada da mão aos elementos do pé dos robôs. Eles construíram pés de robô com vigas transversais internas orientadas em diferentes ângulos. Isso permite que eles se dobrem em torno de pedras ou tubos e obtenham uma grande área de contato com eles. Os testes foram realizados na SDU em Odense, Dinamarca, onde uma plataforma de perna de robô única foi configurada para andar em um cano, e na VISTEC em Rayong, na Tailândia, onde um robô hexapod foi necessário para atravessar um conjunto de canos em terreno rochoso. Aqui eles puderam ver que os sistemas robóticos com um ângulo ideal de travessas a 10° consumiam muito menos energia e se moviam mais rápido e mais facilmente do que um ângulo tradicional de travessas a 90 graus. “Isso é algo que a indústria de petróleo e gás exige”, disse Manoonpong.
Embora os resultados sejam promissores, esta pesquisa é baseada em uma pinça feita de material muito macio. A equipe agora está enfrentando o desafio de fazer uma garra que não apenas dobre e segure, mas também seja robusta e robusta o suficiente para lidar com qualquer ambiente.
Publicado em 29/01/2022 09h10
Artigo original:
Estudo original: