


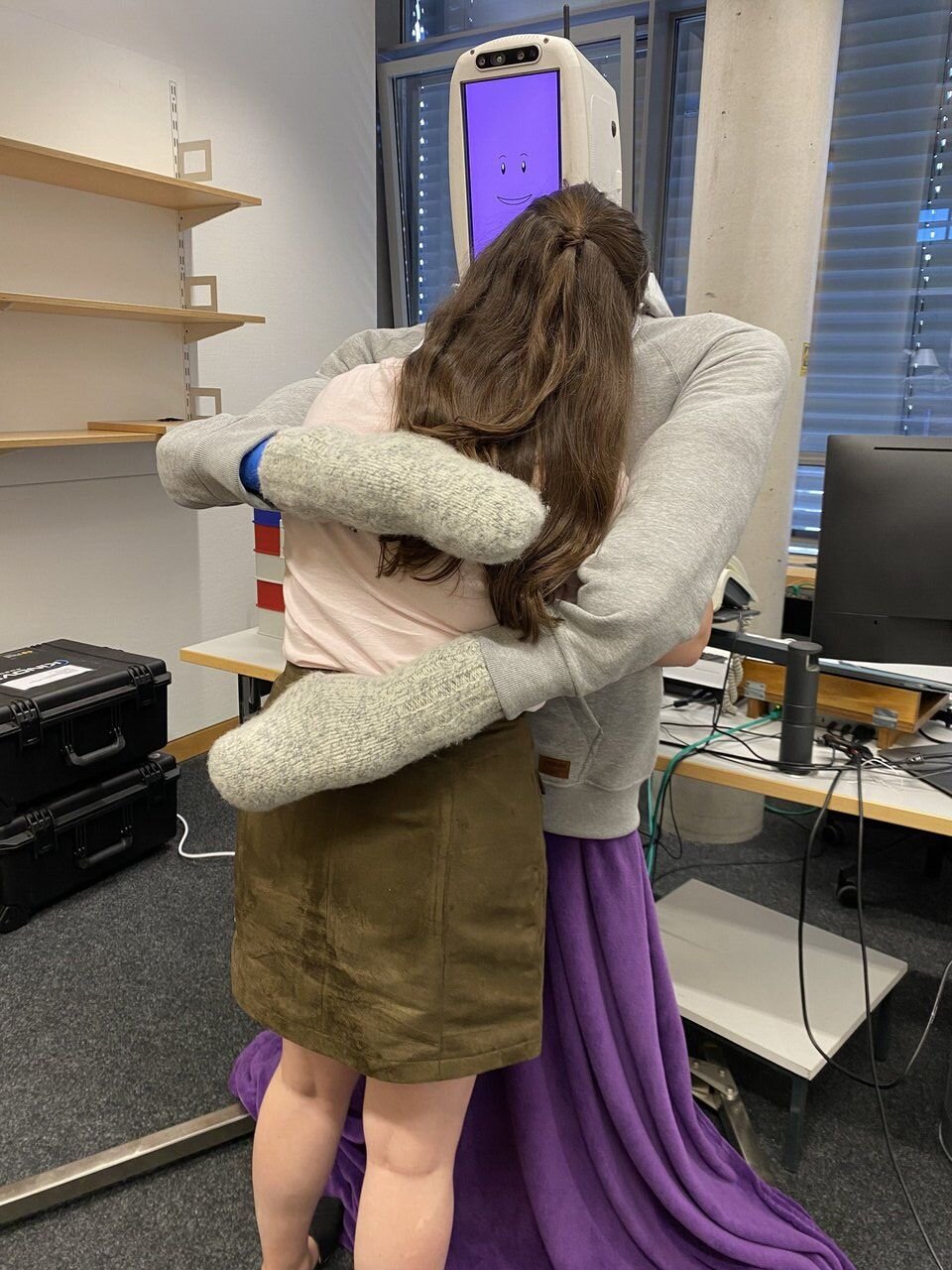
Pesquisadores do Instituto Max Planck de Sistemas Inteligentes (MPI-IS) e da ETH Zürich criaram recentemente o HuggieBot 2.0, um robô que pode abraçar os usuários a pedido deles. Este robô, que será apresentado na Conferência Internacional ACM / IEEE sobre Interação Homem-Robô (HRI) em março, é baseado em um sistema robótico anterior criado por Alexis E. Block, uma das autoras, durante seu mestrado.
“HuggieBot é um projeto de pesquisa no qual trabalhei pela primeira vez com Katherine J. Kuchenbecker no outono de 2016, como parte da minha tese de mestrado em robótica na Universidade da Pensilvânia”, disse Block. “Ambos tínhamos familiares que estavam longe e queríamos abraçar e essa foi a principal inspiração do projeto.”
A versão anterior do robô, batizada de HuggieBot 1.0, era baseada em uma plataforma robótica criada pela Willow Garage, chamada Personal Robot 2 (PR2). O hardware e o software do robô PR2 foram personalizados de uma forma que permitia abranger facilmente os usuários.
Em julho de 2017, Block iniciou seu doutorado. estuda com o MPI ETH Center for Learning Systems, com Kuchenbecker como seu supervisor principal no MPI-IS na Alemanha, e Otmar Hilliges e Roger Gassert como co-supervisores adicionais na ETH Zurich na Suíça. Junto com seus supervisores, ela decidiu continuar o projeto HuggieBot e criar um robô completamente novo para abraços.
“Depois de concluir meu mestrado e criar o primeiro HuggieBot, Katherine e eu ainda estávamos interessados no tópico de um robô que abraça e sentimos que havia mais para descobrir”, disse Block. “O feedback dos usuários nos ensinou que o PR2 era muito volumoso para ser um robô de abraços realmente bom e também não conseguia sentir o usuário bem porque tinha apenas um pequeno sensor de toque nas costas.”
Antes de começarem a trabalhar no HuggieBot 2.0, os pesquisadores revisaram a literatura anterior em robótica e examinaram robôs semelhantes criados no passado. Posteriormente, eles trabalharam em um novo design para o HuggieBot, também envolvendo um doutorado. aluno do laboratório de Otmar na ETH, Sammy Christen, que trabalhou especificamente nos recursos de visão computacional do robô.
“Nossa nova plataforma robótica foi construída de acordo com nossos seis princípios de design, ou ‘mandamentos’ para um abraço robótico natural e agradável”, disse Block. “Ou seja, sentimos que um robô que abraça deve ser macio, ser quente, ter tamanho humano, perceber visualmente seu usuário, ajustar seu abraço ao tamanho e posição do usuário e liberar de forma confiável quando o usuário quiser encerrar o abraço. Seguindo esses mandamentos , O HuggieBot 2.0 dá abraços excelentes. ”
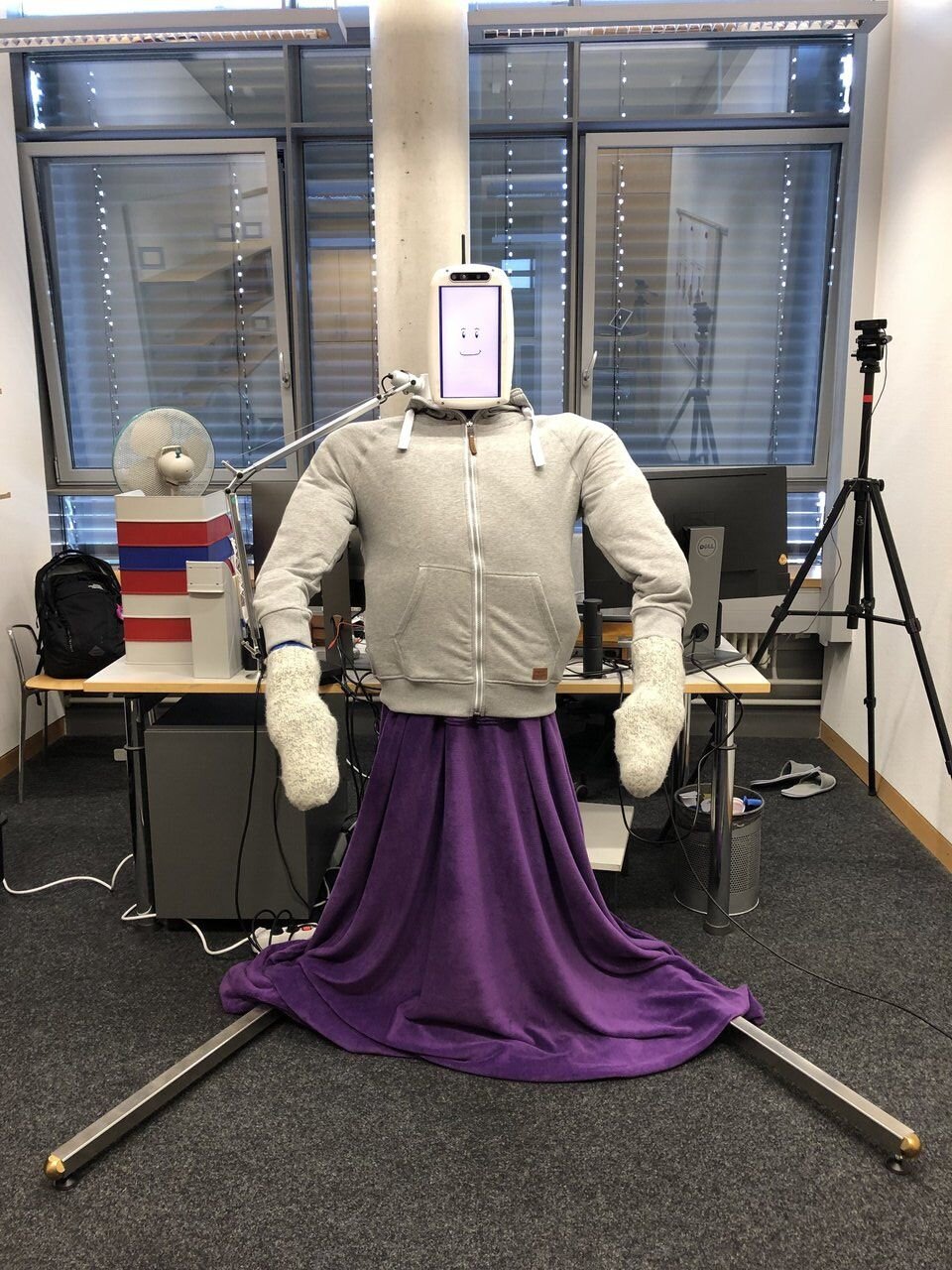
Para construir o HuggieBot 2.0, Block e seus colegas montaram dois braços Kinova JACO (ou seja, braços robóticos comercialmente disponíveis que são normalmente fixados em cadeiras de rodas) em uma estrutura de metal personalizada. Em contraste com sua versão anterior, este robô tem um torso inflável e macio que pode sentir o contato do usuário independentemente do posicionamento de sua mão. O corpo do robô é coberto por almofadas térmicas, um manto roxo e um moletom cinza, enquanto suas mãos estão cobertas por luvas acolchoadas.
A cabeça do HuggieBot 2.0, que foi criada usando impressão 3-D, consiste em um computador, uma tela que funciona como seu rosto, uma câmera com sensor de profundidade, um alto-falante e um microcontrolador. A tela mostra diferentes expressões faciais animadas em um fundo roxo, que dão a sensação de que o robô está sorrindo e piscando.
“Como parte de nosso estudo recente, testamos a influência de três fatores binários diferentes: iniciação do abraço visual, dimensionamento do abraço háptico e liberação do abraço háptico”, disse Block. “Para o início do abraço visual no momento do estudo conduzido no jornal, a câmera do robô detectaria um usuário em seu campo de visão. Assim que a câmera detectasse que o usuário estava caminhando em sua direção, o robô levantaria os braços e perguntaria ao usuário ‘posso dar um abraço, por favor? ” Para o dimensionamento do abraço háptico, modelamos o abraço como uma forma de agarrar. ”
Os braços JACO do HuggieBot 2.0 possuem sensores de torque em cada junta. Usando um método de preensão com limite de torque, os pesquisadores conseguiram tornar o agarre do robô mais adaptável e seguro, garantindo que ele corresponda aos corpos dos usuários individuais e não os segure com muita força ou solta.
“Para a liberação tátil, usamos dois métodos diferentes”, explicou Block. “Primeiro, usamos os sensores de torque nos braços do robô para detectar quando um usuário deseja deixar o abraço. Em seguida, usamos o torso de detecção inflável para detectar quando um usuário removeu seus braços das costas do robô, indicando assim seu desejo para encerrar o abraço. Esses recursos tornam o HuggieBot 2.0 um robô que abraça mais natural e intuitivo. ”
Block e seus colegas avaliaram o HuggieBot 2.0 em dois estudos diferentes. Inicialmente, eles pediram a 117 pessoas para assistir a vídeos e imagens do HuggieBot 1.0 e HuggieBot 2.0. Depois de terem visto esses vídeos e imagens, aqueles que participaram do estudo foram convidados a compartilhar seus comentários e opiniões. Eles descobriram que a maioria dos participantes preferia a versão mais recente do robô, tanto em termos de aparência quanto de movimentos.
Posteriormente, os pesquisadores pediram a 32 pessoas para testar o robô pessoalmente e compartilhar seu feedback com eles. Eles especificamente pediram a eles opiniões sobre como os braços do robô se adaptaram bem ao seu corpo (ou seja, dimensionamento tátil), com que naturalidade eles iniciaram um abraço e com que eficácia os soltaram de um abraço.
No geral, os participantes disseram que sentiram que o dimensionamento tátil (ou seja, como o abraço de um robô se adaptou ao seu corpo) aumentou sua percepção do robô como natural em seus movimentos, inteligente e amigável. No geral, esse recurso de ‘adaptabilidade enorme’ parecia permitir interações mais agradáveis entre o HuggieBot 2.0 e seus usuários.
“Os usuários forneceram muitos comentários positivos sobre o início do abraço visual, dimensionamento e liberação háptica”, disse Block. “Além de validar nossa plataforma de robô customizada, este artigo valida nossos seis princípios de design. Essas descobertas mostram que estamos nos movendo na direção certa para criar abraços de robô mais naturais e agradáveis, mas ainda há espaço para melhorias.”
O feedback que Block e seus colegas coletaram em seus estudos de usuário os ajudou a aperfeiçoar o robô ainda mais, levando à fabricação de uma versão ainda mais recente de seu sistema, chamada HuggieBot 3.0. Este novo robô será apresentado em um novo artigo que está sendo revisado por pares.
“Além de apresentar melhorias de hardware e software, nosso novo artigo sobre o HuggieBot 3.0 centra-se em permitir que o robô detecte, classifique e responda a gestos intra-abraço, como esfregar, dar tapinhas e apertar”, disse Block. “Ser espremido por um robô que abraça é surpreendentemente agradável!”
Para explorar ainda mais o potencial do sistema que desenvolveram, os pesquisadores estão atualmente projetando um novo experimento com o objetivo de avaliar os efeitos fisiológicos de receber abraços do HuggieBot. Embora seja sabido que o contato físico com outros humanos ou mesmo animais pode ter vários benefícios para a saúde (por exemplo, reduzir nossa pressão arterial e níveis de cortisol, aliviar o estresse e a ansiedade, fortalecer nossos laços sociais e sistemas imunológicos e aumentar os níveis de ocitocina), os efeitos de o contato físico com robôs ainda é pouco compreendido. Block e seus colegas gostariam de descobrir se o abraço de um robô pode aliviar o estresse e melhorar o bem-estar físico tanto quanto o de humanos ou animais.
“A evidência de benefícios fisiológicos complementaria e ajudaria a explicar todos os comentários positivos e avaliações que o HuggieBot obteve dos usuários, ao mesmo tempo em que ilustraria que interagir com robôs dessa forma poderia melhorar a saúde humana”, disse Block. “Acreditamos que abraços de robô suaves, calorosos e responsivos podem ajudar a apoiar muitas pessoas que não recebem regularmente abraços de outros humanos.”
Além de avaliar os efeitos fisiológicos do abraço de seu robô nos usuários, os pesquisadores estão desenvolvendo o HuggieApp, um aplicativo que permitiria aos usuários enviarem abraços personalizados remotamente por meio do robô HuggieBot. Por meio desse aplicativo, os usuários podem substituir os rostos animados na tela integrada do robô por vídeos personalizados enviados por seus entes queridos.
“No HuggieApp, os emissores de abraços também podem determinar a duração de um abraço e quais gestos intra-abraço o robô deve realizar e em que horas”, acrescentou Block. “Depois de receberem uma notificação dizendo que receberam um abraço por meio do aplicativo, os usuários só precisarão abordar seu HuggieBot e escanear um código QR para resgatar seu abraço personalizado. Também esperamos poder realizar um estudo para testar se o HuggieBot poderia ajudar a fortalecer os relacionamentos pessoais entre pessoas que estão fisicamente separadas por uma distância. ”
Embora HuggieBot 2.0 e HuggieBot 3.0 ainda sejam protótipos, Block espera eventualmente comercializá-los. Antes que esses sistemas possam ser implementados em grande escala e se tornarem amplamente disponíveis, no entanto, os pesquisadores precisarão aperfeiçoar ainda mais a qualidade de seus abraços e verificar sua segurança e confiabilidade gerais.
“Eu vejo o próximo passo para a comercialização (depois de melhorar o robô) visando instituições de grande escala, onde muitas pessoas poderiam se beneficiar de um único HuggieBot”, disse ela. “Esses lugares podem ser universidades, hospitais ou lares de idosos. Embora nossos estudos tenham demonstrado que existe interesse por um robô que abraça sozinho, acredito que o aplicativo personalizável será um componente necessário de qualquer robô que abraça comercializado.”
Publicado em 14/02/2021 21h03
Artigo original:
Estudo original: