


Para navegar com eficiência pelos ambientes circundantes e completar missões, os sistemas aéreos não tripulados (UASs) devem ser capazes de detectar vários objetos em seus arredores e rastrear seus movimentos ao longo do tempo. Até agora, no entanto, permitir o rastreamento de vários objetos em veículos aéreos não tripulados tem se mostrado bastante desafiador.
Pesquisadores do Lockheed Martin AI Center desenvolveram recentemente uma nova técnica de aprendizado profundo que pode permitir que os UASs rastreiem vários objetos ao seu redor. A técnica deles, apresentada em um artigo pré-publicado no arXiv, pode auxiliar no desenvolvimento de sistemas de vôo autônomo com melhor desempenho e maior capacidade de resposta.
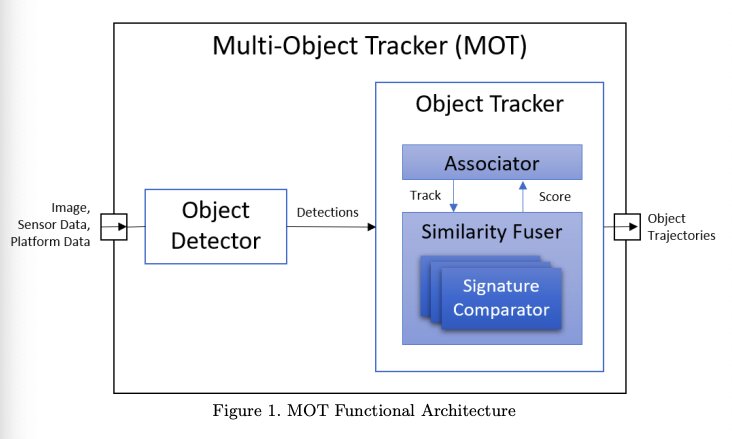
“Apresentamos uma arquitetura robusta de rastreamento de objetos destinada a acomodar o ruído em situações de tempo real”, escreveram os pesquisadores em seu artigo. “Nós propomos um modelo de previsão cinemática, chamado filtro de Kalman estendido profundo (DeepEKF), no qual uma arquitetura de sequência a sequência é usada para prever trajetórias de entidades no espaço latente.”
O modelo de previsão cinemática criado por Wanlin Xie, Jaime Ide e seus colegas no Lockheed Martin AI Center usa essencialmente uma incorporação de imagem adquirida e um mecanismo de atenção computacional para pesar a ‘importância’ de diferentes partes de uma imagem para prever mudanças e estados futuros. Posteriormente, o modelo utiliza medidas de similaridade para calcular distâncias entre objetos, por meio da análise de imagens por meio de um codificador de rede neural convolucional (CNN), pré-treinado em redes neurais siamesas.
Uma rede neural siamesa é uma técnica de IA na qual duas redes neurais idênticas geram vetores de recursos para cada entrada de dados individual e comparam esses vetores. Essas abordagens podem ser particularmente úteis em situações em que os pesquisadores estão tentando detectar anomalias ou diferenças nas imagens, bem como para aplicativos de reconhecimento de rosto e objeto.
Os pesquisadores avaliaram sua técnica de aprendizado profundo usando imagens de vídeo anotadas coletadas por uma câmera integrada em um UAS de asa fixa. Essas sequências de vídeo rotuladas continham uma série de objetos em movimento, incluindo pessoas e veículos.
“Queríamos diagnosticar com precisão o quão bem nosso modelo pode acompanhar de forma precisa e consistente entidades distintas de objetos ao longo de períodos contínuos de tempo”, escreveram os pesquisadores em seu artigo. “Analisamos várias medidas de desempenho, incluindo previsão de ausência, gráficos de recuperação de previsão, longevidade de rastreamento, etc.”
Um filtro de Kalman (KF) é um algoritmo que pode estimar algumas variáveis desconhecidas, quando é alimentado com uma série de medidas coletadas ao longo do tempo. A abordagem de rastreamento multi-objeto proposta pelos pesquisadores é uma versão mais avançada de um KF, que também integra técnicas de aprendizado profundo.
Nas avaliações iniciais, a arquitetura DeepEKF desenvolvida por Xie, Ide e seus colegas alcançou resultados notáveis, superando os algoritmos KF padrão para rastreamento de vários objetos. No futuro, sua estrutura poderia ser usada para aprimorar os recursos de uma variedade de UASs.
“Embora relatemos resultados de prova de conceito, o treinamento adicional do DeepEKF, bem como das redes siamesas, é necessário à medida que coletamos mais dados”, escreveram os pesquisadores em seu artigo. “Em particular, planejamos adicionar uma avaliação mais extensa para o componente de rastreamento de longo prazo (re-identificação). Outro local promissor é combinar dinamicamente as diferentes pontuações cinemáticas e visuais dentro do componente do fusor de similaridade de acordo com o ambiente e os estados da trilha. ”
Publicado em 15/10/2021 14h29
Artigo original:
Estudo original: