


Os processos de tomada de decisão humana são inerentemente hierárquicos. Isso significa que envolvem vários níveis de raciocínio e diferentes estratégias de planejamento que operam simultaneamente para atingir as metas de curto e longo prazo.
Ao longo da última década, um número crescente de cientistas da computação tem tentado desenvolver ferramentas e técnicas computacionais que possam replicar os processos de tomada de decisão humana, permitindo que robôs, veículos autônomos ou outros dispositivos tomem decisões de forma mais rápida e eficiente. Isso é particularmente importante para sistemas robóticos que executam ações que afetam diretamente a segurança dos seres humanos, como carros autônomos.
Pesquisadores do Honda Research Institute dos EUA, Honda R&D e UC Berkeley recentemente compilaram o LOKI, um conjunto de dados que poderia ser usado para treinar modelos que prevêem as trajetórias de pedestres e veículos na estrada. Este conjunto de dados, apresentado em um artigo pré-publicado no arXiv e definido para ser apresentado na conferência ICCV 2021, contém imagens cuidadosamente rotuladas de diferentes agentes (por exemplo, pedestres, bicicletas, carros, etc.) na rua, capturadas da perspectiva de um motorista.
“Em nosso artigo recente, propomos raciocinar explicitamente sobre os objetivos de longo prazo dos agentes, bem como suas intenções de curto prazo para prever as trajetórias futuras dos agentes de trânsito em cenas de direção”, Chiho Choi, um dos pesquisadores que realizou o estudo , disse TechXplore. “Definimos metas de longo prazo como uma posição final que um agente deseja alcançar para um determinado horizonte de previsão, enquanto a intenção se refere a como um agente realiza seu objetivo.”
Choi e seus colegas levantaram a hipótese de que, para prever as trajetórias dos agentes de tráfego de forma mais eficiente, é importante que as técnicas de aprendizado de máquina considerem uma hierarquia complexa de objetivos de curto e longo prazo. Com base nos movimentos do agente previstos, o modelo pode então planejar os movimentos de um robô ou veículo de forma mais eficiente.
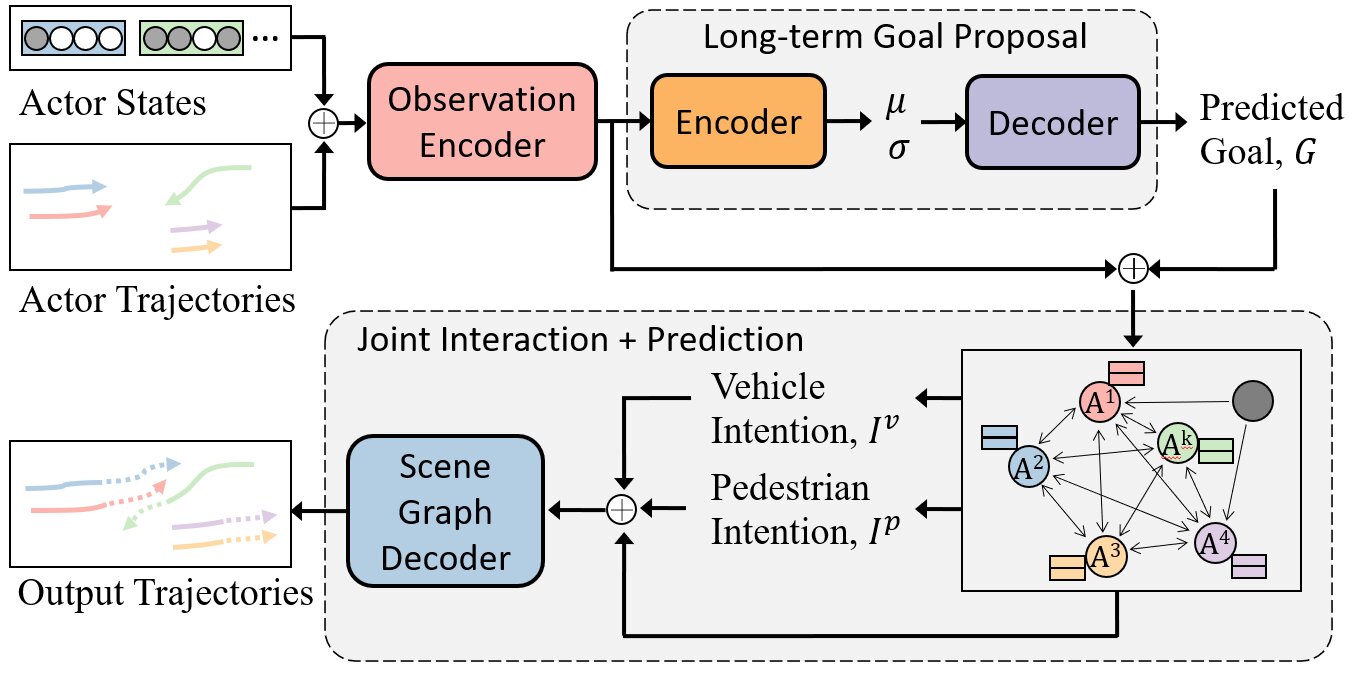
Os pesquisadores, portanto, se propuseram a desenvolver uma arquitetura que considera os objetivos de curto e longo prazo como componentes-chave da estimativa de intenção de acordo com o quadro. Os resultados dessas considerações, então, influenciam seu módulo de previsão de trajetória.
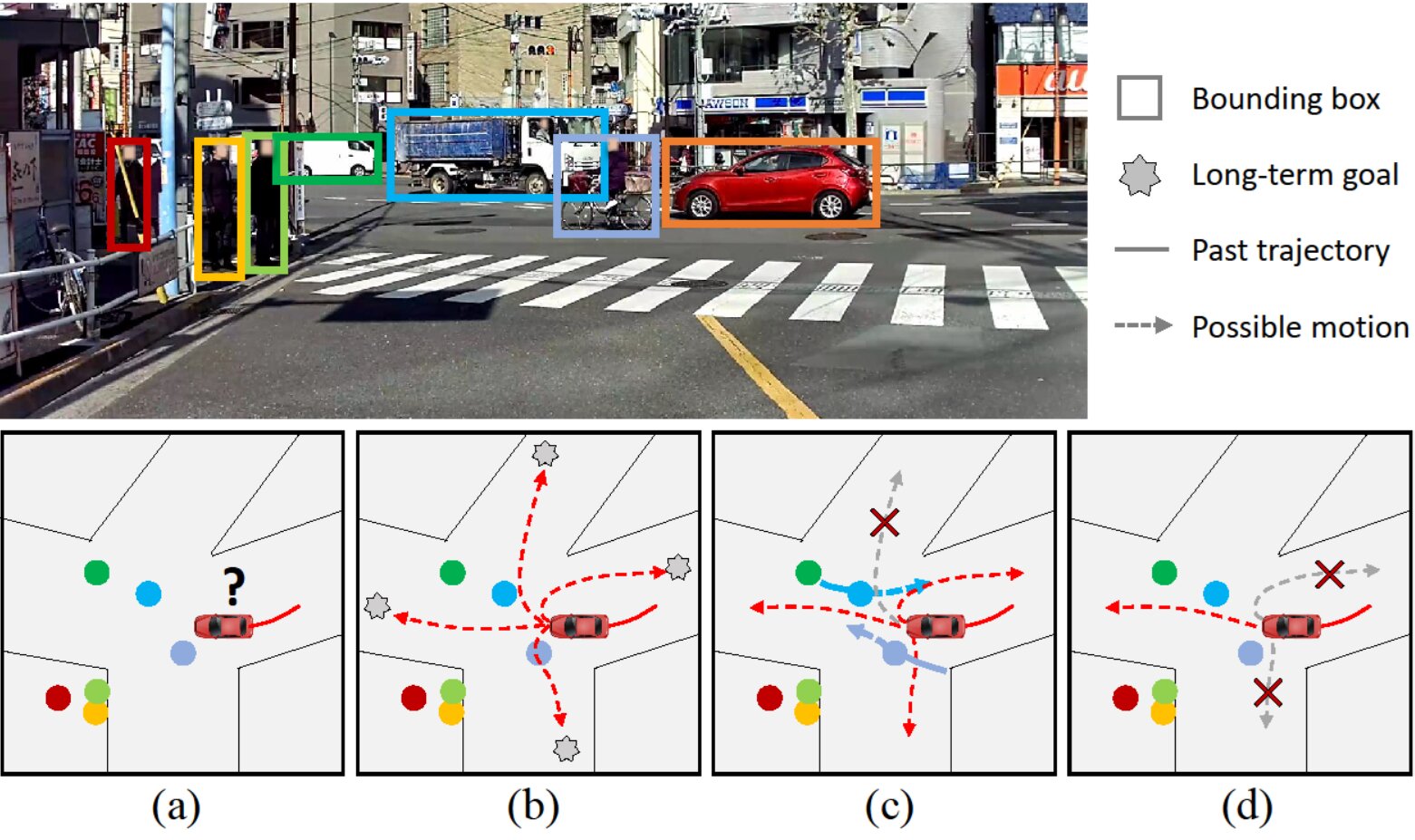
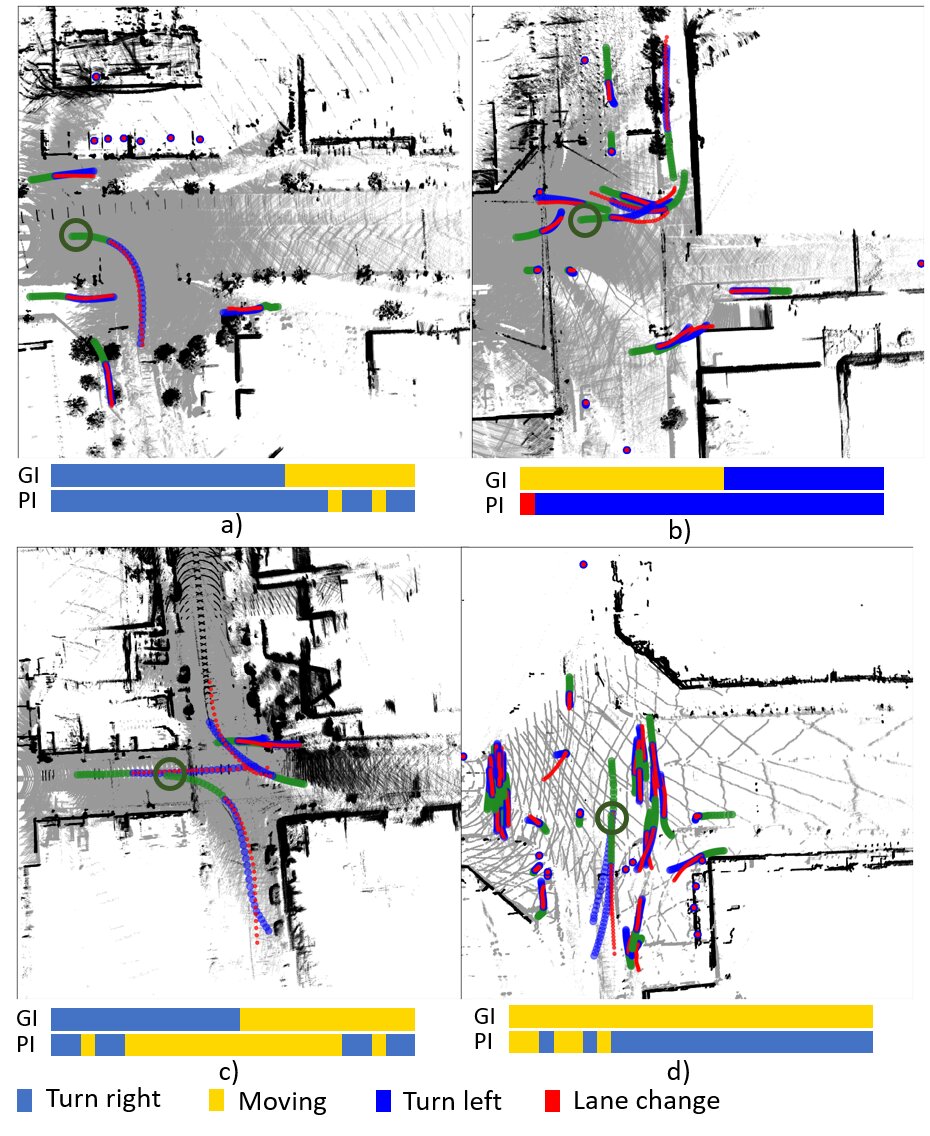
“Considere um veículo em uma interseção onde deseja atingir seu objetivo final de virar à esquerda até seu ponto final”, explicou Choi. “Ao raciocinar sobre o movimento do agente para virar à esquerda, é importante considerar não apenas a dinâmica do agente, mas também como a intenção está sujeita a mudanças com base em muitos fatores, incluindo i) a própria vontade do agente, ii) interações sociais, iii) restrições ambientais , iv) dicas contextuais.”
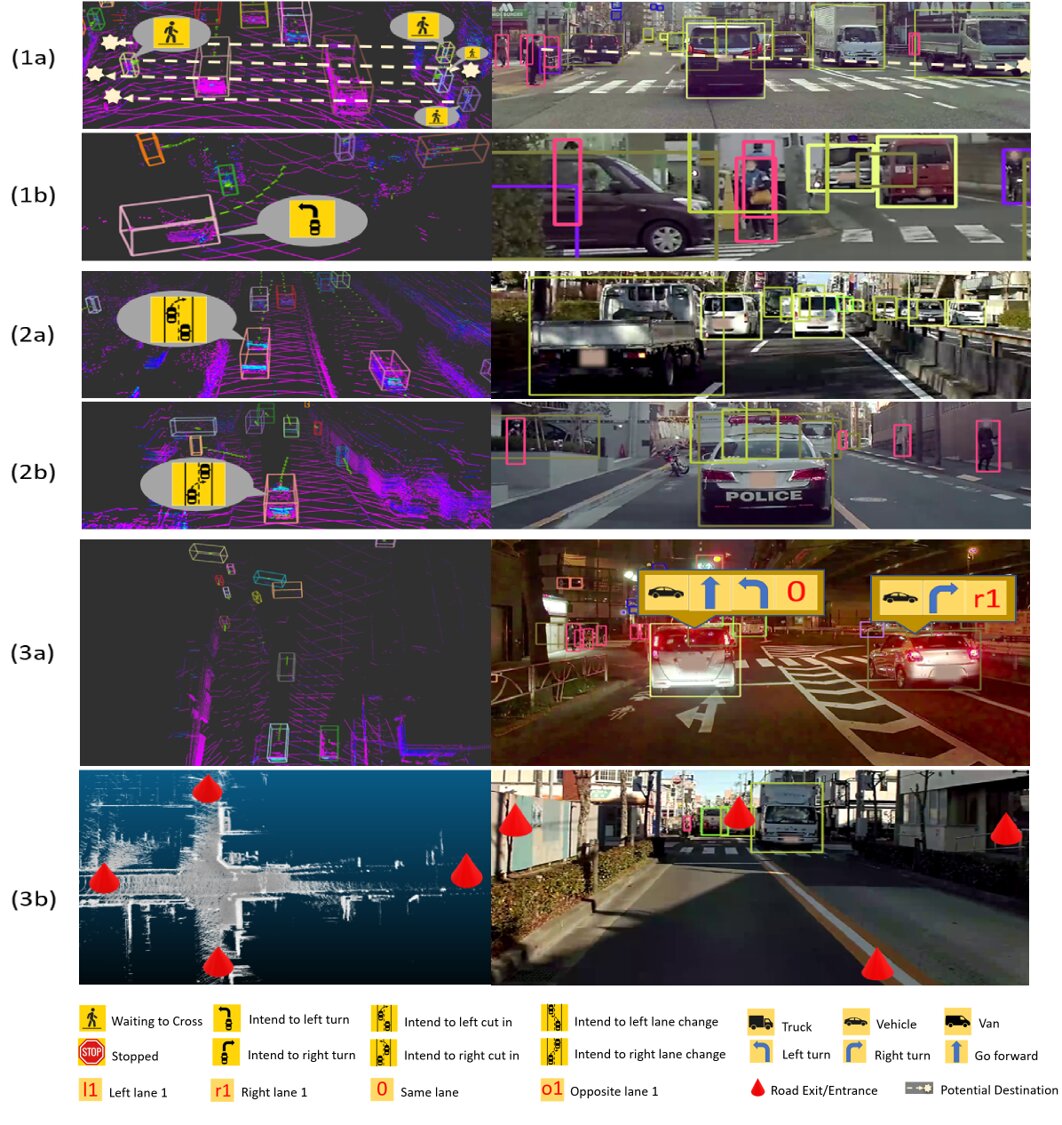
O conjunto de dados LOKI contém centenas de imagens RGB retratando diferentes agentes no tráfego. Cada uma dessas imagens tem nuvens de pontos LiDAR correspondentes com rótulos detalhados de quadros para todos os agentes de tráfego.
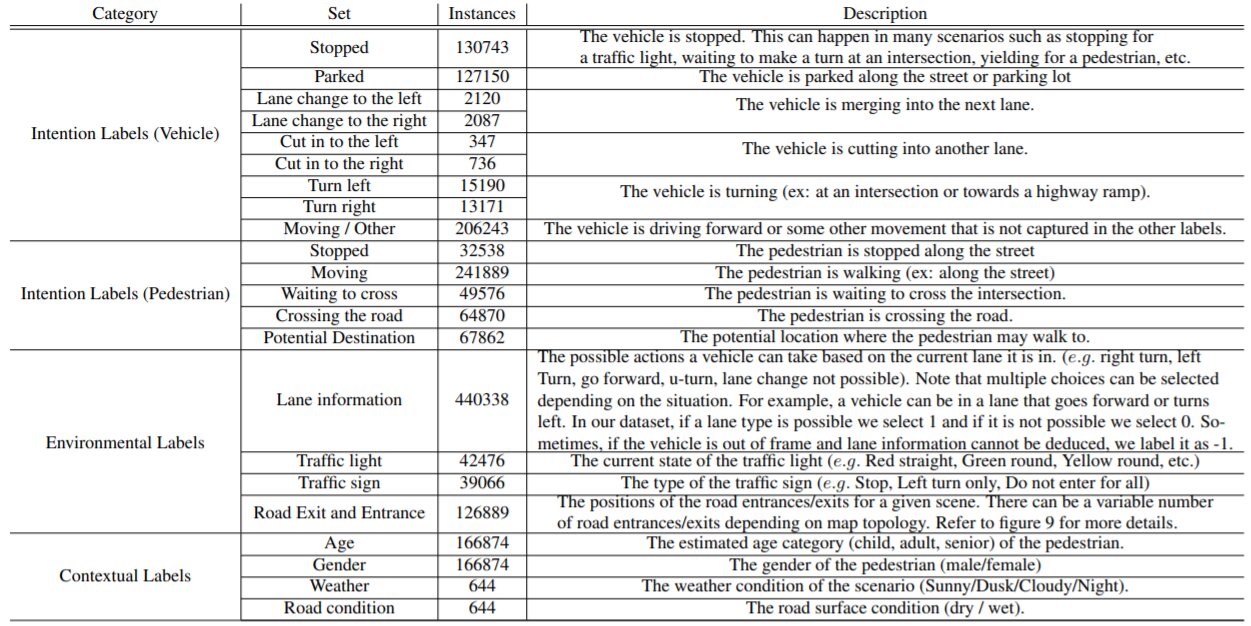
O conjunto de dados possui três classes exclusivas de rótulos. O primeiro deles são rótulos de intenção, que especificam ‘como’ um ator decide atingir um determinado objetivo por meio de uma série de ações. O segundo são rótulos ambientais, fornecendo informações sobre o meio ambiente que impactam as intenções dos agentes (por exemplo, posições de ‘saída da estrada’ ou ‘entrada da estrada’, ‘semáforo, “‘ sinal de trânsito,” ‘informações da faixa, “etc.). A terceira classe inclui rótulos contextuais que também podem afetar o comportamento futuro dos agentes, como informações relacionadas ao clima, condições das estradas, sexo e idade dos pedestres e assim por diante.
“Fornecemos uma compreensão abrangente de como as intenções mudam em um longo horizonte de tempo”, disse Choi. “Ao fazer isso, o conjunto de dados LOKI é o primeiro que pode ser usado como referência para a compreensão da intenção de agentes de tráfego heterogêneos (ou seja, carros, caminhões, bicicletas, pedestres, etc.).”
Além de compilar o conjunto de dados LOKI, Choi e seus colegas desenvolveram um modelo que explora como os fatores considerados pela LOKI podem afetar o comportamento futuro dos agentes. Este modelo pode prever as intenções e trajetórias de diferentes agentes na estrada com altos níveis de precisão, considerando especificamente o impacto de i) a própria vontade de um agente, ii) interações sociais, iii) restrições ambientais e iv) informações contextuais sobre seu curto -termo ações e processo de tomada de decisão.
Os pesquisadores avaliaram seu modelo em uma série de testes e descobriram que superava outros métodos de previsão de trajetória de última geração em até 27%. No futuro, o modelo poderá ser usado para aumentar a segurança e o desempenho de veículos autônomos. Além disso, outras equipes de pesquisa poderiam usar o conjunto de dados LOKI para treinar seus próprios modelos para prever as trajetórias de pedestres e veículos na estrada.
?Já começamos a explorar outras direções de pesquisa destinadas a raciocinar conjuntamente sobre intenções e trajetórias, considerando diferentes fatores internos / externos, como a vontade dos agentes, interações sociais e fatores ambientais,? disse Choi. “Nosso plano imediato é explorar ainda mais o espaço de previsão com base na intenção, não apenas para trajetórias, mas também para movimentos e comportamentos humanos em geral. Atualmente, estamos trabalhando na expansão do conjunto de dados LOKI nessa direção e acreditamos que nosso conjunto de dados altamente flexível encorajará a comunidade de previsão para avançar ainda mais esses domínios. “
Publicado em 10/09/2021 13h06
Artigo original:
Estudo original: