


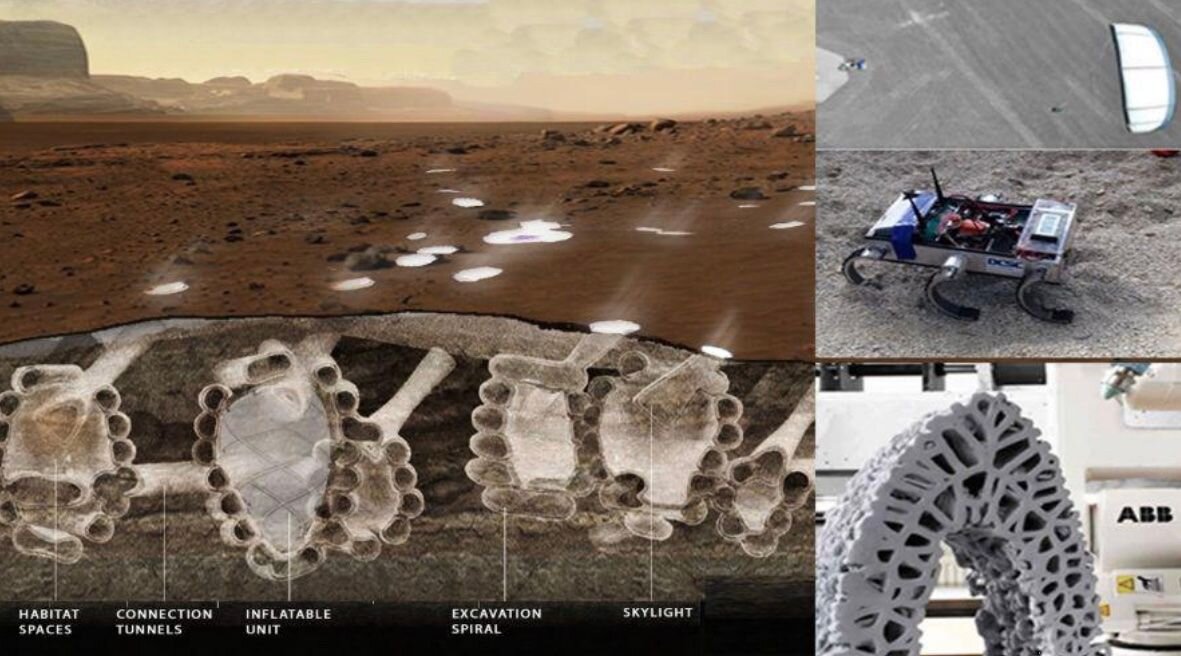
Os habitats subterrâneos tornaram-se recentemente um ponto focal dos esforços de colonização fora do planeta. A proteção contra micrometeoritos, radiação e outros perigos potenciais torna os locais subterrâneos desejáveis em comparação com as habitações superficiais. A construção de tais estruturas subterrâneas apresenta uma infinidade de desafios, e o menor deles é como realmente construí-las. Uma equipe de pesquisadores da Delft University of Technology (TUD) está trabalhando em um plano para escavar material e usá-lo para imprimir habitats. Tudo isso seria feito com um grupo de robôs em enxame.
A ideia surge de uma oportunidade de concessão publicada pela Agência Espacial Europeia. Os alunos do laboratório de construção robótica (RB) em TU Delft, liderados pela Dra. Henriette Bier, estavam entusiasmados em participar do desafio que se concentra na utilização de recursos in-situ para construção fora da Terra. A equipe da RB, juntamente com especialistas em ciência dos materiais, robótica e engenharia aeroespacial, apresentou uma ideia que recebeu ? 100k para desenvolver uma prova de conceito preliminar.
A abordagem proposta concentra-se na especialidade do laboratório – construção robótica – e tem quatro componentes principais – escavar o regolito, imprimir um novo habitat usando um processo de manufatura aditiva, coordenar o trabalho entre todos os robôs que seriam necessários para completar as tarefas, e alimentando-os, bem como o habitat.
Escavar regolito com robôs já foi explorado anteriormente, mas geralmente no contexto da lua. Diferentes padrões de escavação são úteis para construir diferentes estruturas, e o padrão em que a equipe RB se concentrou foi uma espiral descendente. Tal estrutura poderia criar uma estrutura estável e segura dentro de uma pegada relativamente pequena na superfície.
Vídeo discutindo como a metodologia de enxame pode ser implementada para auxiliar na exploração de Marte. Crédito: Universo Hoje
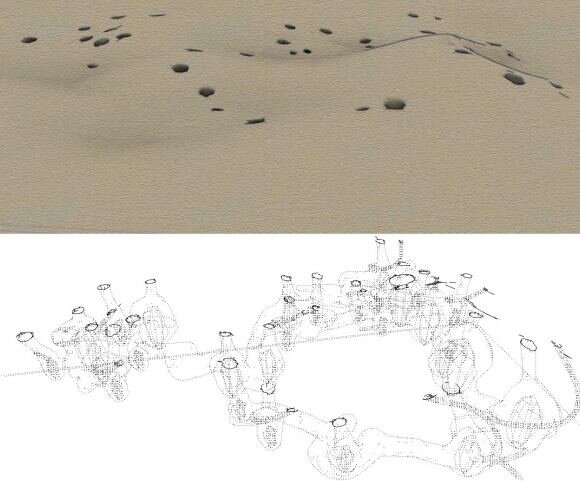
Modelar as tensões e deformações nessa estrutura é um componente chave do projeto de estudo atual. A equipe desenvolveu um protótipo em escala de 1m x 1m de um fragmento com padrões que lhes permitiriam criar áreas seguras e estáveis de forma eficaz. Algumas dessas áreas foram projetadas com a habitação em mente, incluindo áreas de plantas destacáveis que poderiam abrigar plantas cultivadas hidroponicamente.
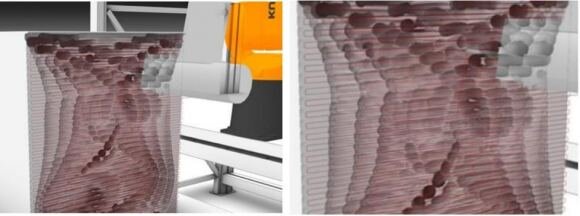
Toneladas e mais toneladas de regolito teriam que ser removidas de qualquer sítio de escavação em escala da vida real. Esse regolito é usado como material para imprimir em 3D um habitat estável. Originalmente, a equipe estava planejando combinar regolito com enxofre líquido para produzir concreto. Mas depois de envolver cientistas de materiais e um parceiro industrial especializado em impressão robótica com cimento, eles decidiram usar concreto à base de cimento aproveitando alguns dos recursos hídricos de Marte. A própria criação de cimento requer uma infraestrutura, portanto, qualquer plano de uso de regolito teria que esperar até que a infraestrutura já estivesse em vigor no planeta.
A estruturação do próprio habitat também é uma consideração importante ao projetar a forma que deve ser impressa em 3D. A equipe se concentrou em estruturas relativamente porosas, o que permitiu o uso de menos material em sua construção. No entanto, as estruturas ainda tinham resistência e durabilidade notavelmente altas e também forneceram um bom isolamento da radiação e dos impactos de micrometeoritos que a colônia de subsuperfície está tentando evitar.
Algumas das vantagens dessa abordagem são devidas a um dos maiores impulsionadores da inovação – a colaboração. O projeto é coordenado pelo laboratório RB, mas envolve parceiros da TUD e parceiros comerciais externos. Esses colaboradores trazem experiência em engenharia civil, aeroespacial e robótica e tecnologias de manufatura aditiva para o desenvolvimento da abordagem de construção de enxame robótico.
Publicado em 24/05/2021 01h11
Artigo original: