


Nos últimos anos, os pesquisadores tentaram aplicar a teoria da física quântica a uma variedade de campos, incluindo robótica, biologia e ciência cognitiva. Técnicas computacionais que se inspiram em sistemas quânticos, também conhecidos como modelos quânticos (QL), podem potencialmente obter melhor desempenho e recursos mais sofisticados do que abordagens mais convencionais.
Pesquisadores da Universidade de Gênova, na Itália, recentemente investigaram a viabilidade de usar uma abordagem de QL para aprimorar as capacidades de detecção de um robô. Em seu artigo, pré-publicado no arXiv, eles apresentam os resultados de um estudo de caso em que testaram um modelo de percepção de QV em um robô com recursos limitados de detecção em um ambiente simulado.
“A idéia para este estudo veio a mim depois de ler um artigo escrito em 1993 por Anton Amann (‘O problema da Gestalt na teoria quântica’) no qual ele comparou o problema da percepção da Gestalt com a atribuição da forma molecular na física quântica”. Davide Lanza, um dos pesquisadores que realizou o estudo, disse ao TechXplore. “Fiquei impressionado com esse paralelo entre cognição e fenômenos quânticos e descobri o campo florescente dos estudos sobre cognição quântica”.
Inspirado pelas idéias apresentadas por Amann, Lanza procurou seu supervisor Fulvio Mastrogiovanni e perguntou se ele poderia investigar o uso da modelagem da cognição quântica para aprimorar a percepção robótica como parte de sua tese de mestrado. Uma vez que Mastrogiovanni aprovou sua idéia, ele começou a definir um modelo preliminar para testar a viabilidade de usar uma abordagem QL em robótica, em colaboração com Paolo Solinas, um professor de física especializado em computação quântica na Universidade de Gênova.
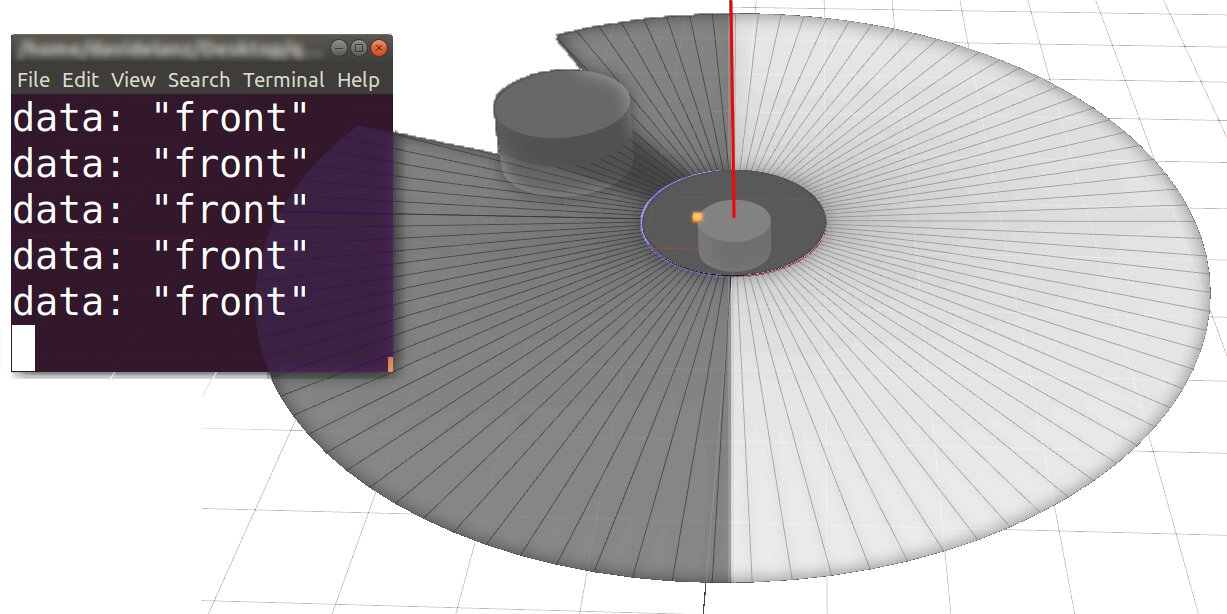
Como etapa inicial de sua pesquisa, Lanza e Solinas definiram um estudo de caso simplificado, em que um robô deve ser capaz de detectar se um objeto é colocado na frente ou nas costas. Seu objetivo era investigar como um modelo de QV lidaria com a desambiguação de incerteza e percepção nessa situação simples, que envolvia uma escolha entre duas opções (isto é, frontal ou traseira), antes de aplicá-lo a cenários mais complexos.
“Armazenamos as informações coletadas pelo sensor do robô em um único qubit”, explicou Lanza. “Foi permitido ao qubit ter os dois estados ‘front’ e ‘back’ em uma superposição coerente, permitindo modelagem de incerteza para situações mistas ‘front-back’. Posteriormente, quando o qubit é medido, ele retorna uma leitura com uma probabilidade de que está relacionado a essa superposição “.
Quando os pesquisadores testaram um modelo de percepção de QV em uma simulação do estudo de caso que eles definiram, descobriram que o desempenho era comparável às técnicas não quânticas. No entanto, o modelo só teve bom desempenho quando foi testado usando um simulador quântico chamado QASM, que emula a execução de circuitos quânticos em um dispositivo de computação clássico.
A implementação do modelo na plataforma IBM Quantum Experience (IBMQ), por outro lado, resultou em vários erros, principalmente em tentativas em que o objeto estava em uma posição ambígua (ou seja, quando não era tão claro se ele estava em frente ou na parte traseira do robô). Lanza, Solinas e Mastrogiovanni argumentam, portanto, que os modelos de percepção de QV poderiam ser testados com mais eficácia em simulações, pois realizações em back-ends quânticos podem levar a vários erros em situações desequilibradas.
“Usar um qubit é, na minha opinião, uma solução mais compacta e elegante para modelagem de percepção e cognição”, disse Lanza. “De fato, um qubit inerentemente fornece recursos interessantes de modelagem típicos de sistemas quânticos, sem a necessidade de mais módulos para lidar com resultados probabilísticos”.
O artigo recente publicado no arXiv é apenas a primeira parte do projeto realizado por Lanza, Solinas e Mastrogiovanni. Os pesquisadores agora estão explorando a possibilidade de aplicar o mesmo modelo de QL em cenários mais complexos, enquanto também o testam em simulações envolvendo robôs com vários sensores integrados.
As descobertas que eles reuniram até agora destacam o potencial de introduzir modelos baseados na teoria quântica na pesquisa em robótica. No futuro, eles poderiam inspirar outras equipes de pesquisa a aplicar modelos de QV da cognição humana a problemas de robótica e avaliar seu desempenho.
“Após este estudo preliminar, começamos a trabalhar na integração multissensorial, desenvolvendo um modelo para vários sensores capazes de interpolar os dados e explorar totalmente os recursos quânticos”, disse Lanza.
Publicado em 14/07/2020 13h20
Artigo original:
Achou importante? Compartilhe!


Assine nossa newsletter e fique informado sobre Astrofísica, Biofísica, Geofísica e outras áreas. Preencha seu e-mail no espaço abaixo e clique em “OK”: