


As técnicas de imagem por ultrassom provaram ser ferramentas altamente valiosas para o diagnóstico de uma variedade de condições de saúde, incluindo doença arterial periférica (DAP). A PAD, uma das doenças mais comuns entre os idosos, envolve o bloqueio ou estreitamento dos vasos sanguíneos periféricos, o que limita o fornecimento de sangue a áreas específicas do corpo.
Os métodos de imagem por ultrassom estão entre os meios mais populares de diagnóstico de DAP, devido às suas muitas características vantajosas. Na verdade, ao contrário de outros métodos de imagem, como angiografia por tomografia computadorizada e angiografia por ressonância magnética, a ultrassonografia é não invasiva, de baixo custo e livre de radiação.
A maioria das técnicas de imagem de ultrassom existentes são projetadas para capturar imagens bidimensionais em tempo real. Embora isso possa ser útil em alguns casos, sua incapacidade de coletar informações tridimensionais reduz a confiabilidade dos dados coletados, aumentando sua sensibilidade às variações em como os médicos individuais usaram uma determinada técnica.
Pesquisadores da Universidade Técnica de Munique, da Universidade de Zhejiang e da Universidade Johns Hopkins desenvolveram recentemente um novo sistema robótico que pode capturar imagens de ultrassom 3D de boa qualidade. Este sistema robótico, apresentado em um artigo pré-publicado no arXiv, pode permitir que médicos e profissionais de saúde coletem dados anatômicos mais confiáveis usando a tecnologia de ultrassom.
A grande maioria dos sistemas de imagem de ultrassom 3D desenvolvidos até agora não permite que os usuários capturem toda a árvore arterial de membros humanos individuais, pois os objetos que estão sendo examinados não podem ser ajustados enquanto os dados estão sendo coletados. Se um objeto ou membro se move durante o processo de coleta de dados, de fato, a qualidade das imagens 3D coletadas por esses sistemas tende a diminuir substancialmente.
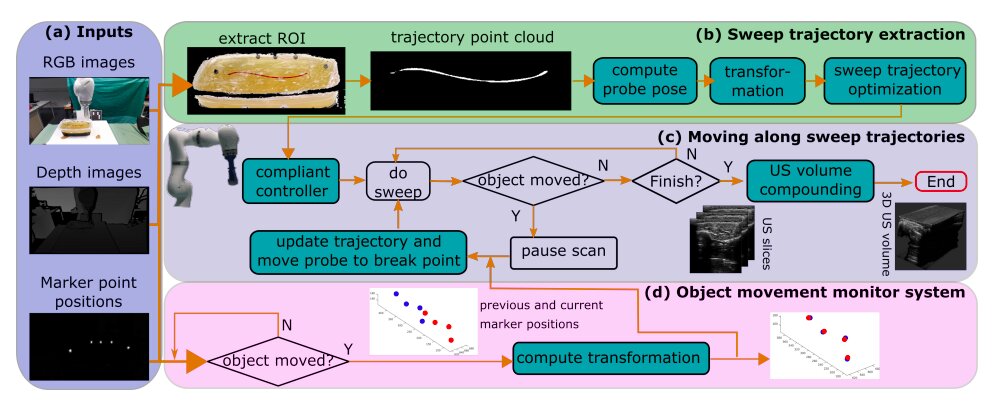
“Para enfrentar este desafio, propomos um sistema de ultrassom robótico baseado em visão que pode monitorar o movimento de um objeto e atualizar automaticamente a trajetória de varredura para fornecer imagens compostas em 3D da anatomia do alvo perfeitamente”, Zhongliang Jiang e seus colegas escreveram em seu artigo.
Seu sistema robótico é baseado na visão computacional. Na verdade, ele inicialmente usa uma câmera de profundidade para extrair a trajetória de varredura planejada manualmente do objeto que está sendo examinado. Esta trajetória de varredura é então usada para estimar a direção normal do objeto.
“Posteriormente, para monitorar o movimento e compensar ainda mais esse movimento para seguir com precisão a trajetória, a posição dos marcadores passivos firmemente fixados é rastreada em tempo real”, explicaram os pesquisadores em seu artigo. “Finalmente, uma composição em etapas é realizada.”
Além de uma câmera de profundidade RGB-D, o sistema robótico criado por Jiang e seus colegas consiste em um manipulador robótico, uma sonda linear CPLA12875 e uma interface de ultrassomB. Os movimentos do manipulador robótico podem ser controlados por meio de um sistema criado pela equipe, que é baseado no sistema operacional do robô (ROS), um framework para escrever software robótico.
O software em que o sistema está rodando tem três componentes principais, ou seja, uma técnica de extração de trajetória de varredura baseada em visão, uma varredura automática de ultrassom robótico e um método de composição de ultrassom 3D, bem como um sistema de monitoramento de movimento. Este último é projetado para atualizar a trajetória extraída pelo sistema e corrigir a composição 3D.
Para avaliar o desempenho do sistema que eles criaram, Jiang e seus colegas realizaram uma série de experimentos usando um fantoma vascular baseado em gel e projetado sob medida. Suas descobertas foram altamente promissoras, já que seu sistema foi capaz de capturar imagens 3D completas e de boa qualidade de vasos sanguíneos alvo, mesmo quando o objeto que estava examinando estava em movimento.
“A validação preliminar em um simulador de gel demonstra que a abordagem proposta pode fornecer uma geometria 3D promissora, mesmo quando o objeto digitalizado é movido”, escreveram os pesquisadores em seu artigo. “Embora a aplicação vascular tenha sido usada para demonstrar o método proposto, o método também pode ser usado para outras aplicações, como a visualização óssea por ultrassom.”
Publicado em 25/08/2021 01h54
Artigo original:
Achou importante? Compartilhe!