


Pesquisadores da Universidade de Ulm, na Alemanha, desenvolveram recentemente uma nova estrutura que pode ajudar a tornar os carros autônomos mais seguros em ambientes urbanos e altamente dinâmicos. Essa estrutura, apresentada em um artigo pré-publicado no arXiv, foi projetada para identificar possíveis ameaças ao redor do veículo em tempo real.
O artigo da equipe baseia-se em um de seus estudos anteriores, apresentado no IEEE Transactions on Intelligent Vehicles no início deste ano. Este trabalho anterior teve como objetivo fornecer aos veículos autônomos capacidades de percepção do ambiente ciente da situação, tornando-os mais responsivos em ambientes desconhecidos complexos e dinâmicos.
“A ideia central por trás do nosso trabalho é alocar recursos de percepção apenas para áreas ao redor de um veículo automatizado que sejam relevantes em sua situação atual (por exemplo, sua tarefa de direção atual) em vez do campo de percepção ingênuo de 360°”, Matti Henning, um dos pesquisadores que realizaram o estudo, disseram ao TechXplore. “Dessa forma, recursos computacionais podem ser economizados para aumentar a eficiência dos veículos automatizados.”
Quando o campo perceptivo dos veículos automatizados é limitado, sua segurança pode diminuir consideravelmente. Por exemplo, se um veículo considera apenas regiões específicas em seu entorno como “relevantes”, ele pode falhar na detecção de objetos potencialmente ameaçadores em outras regiões. Isso pode acontecer se os algoritmos que sustentam o funcionamento do veículo forem programados para considerar e processar apenas uma área específica da estrada.
“É aqui que nossa abordagem de identificação de região de ameaça entra em ação: regiões que podem corresponder a ameaças em potencial são marcadas como relevantes em um estágio inicial da percepção, para que os objetos dentro dessas regiões possam ser percebidos e avaliados de maneira confiável com seu risco real de colisão/ameaça “, explicou Henning. “Consequentemente, nosso trabalho teve como objetivo projetar um método baseado exclusivamente em informações on-line, ou seja, sem informações a priori, por exemplo, na forma de mapa, para identificar regiões que potencialmente correspondam a ameaças, para que possam ser encaminhadas como requisito ser percebido”.
Para ser aplicado em larga escala, o framework dos pesquisadores deve ser o mais leve possível. Em outras palavras, ele não deve precisar de recursos computacionais extensivos para varrer continuamente o ambiente em busca de ameaças.
O método proposto por Henning e seus colegas é muito simples, pois só precisa realizar um número limitado de cálculos. Além disso, é altamente adaptável, portanto, pode ser adaptado para casos de uso ou veículos específicos.
Essencialmente, a estrutura captura representações do ambiente sem modelo, que incluem estimativas de velocidade para todos os objetos em movimento nos arredores do veículo. Isso significa que, ao contrário de outras abordagens, não se baseia em um mapa limitado e previamente delineado de áreas relevantes.
“Especificamente, aproveitamos um Cartesian Dynamic Occupancy Grid Map (DOGMa), que fornece uma estimativa de velocidade para cada célula do ambiente rasterizado”, disse Henning. “A partir disso, usamos um algoritmo de agrupamento padrão para identificar aglomerados suficientemente grandes de células de velocidade semelhante (uma abordagem adaptada de um estudo de Gies et al.) com o movimento do veículo automatizado dentro de um horizonte de previsão definido.”
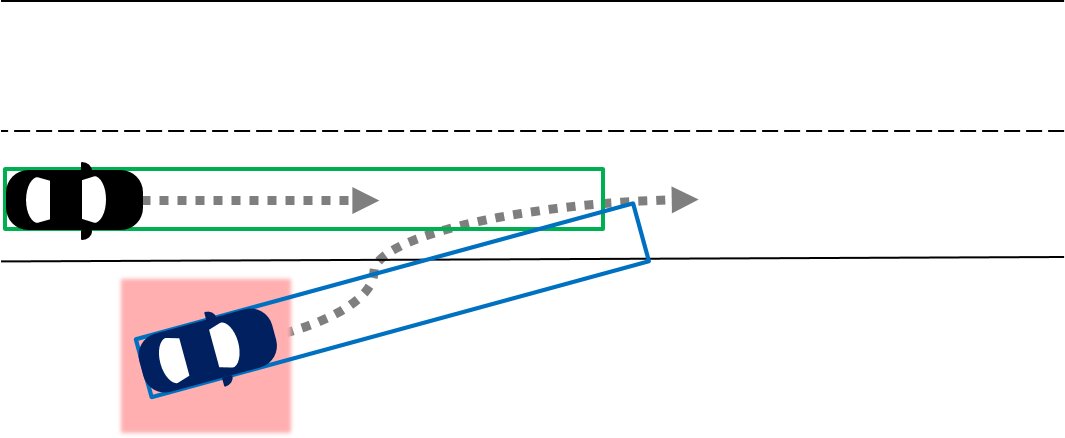
Se os agrupamentos de células em movimento identificados pelo algoritmo de agrupamento da equipe cruzarem com o movimento do veículo, pode ocorrer uma possível colisão com o objeto correspondente. Para evitar isso, o modelo da equipe marca a posição dos clusters como uma região relevante que deve ser processada, para que o veículo possa perceber objetos dentro dele e adaptar sua velocidade ou direção para evitar acidentes.
A principal diferença entre a estrutura criada por Henning e seus colegas e outras abordagens de identificação de ameaças introduzidas no passado é que ela tenta identificar as ameaças o mais cedo possível. Sua abordagem primeiro identifica regiões que contêm objetos em movimento e, em seguida, aloca recursos computacionais para essas regiões, usando uma técnica introduzida em seu trabalho anterior.
Isso permite que o veículo detecte onde estão os objetos em movimento e as ameaças em potencial antes que estejam nas proximidades imediatas. Uma vez identificados, um módulo de avaliação de ameaças avaliaria o risco de colisões com esses objetos e um planejador delinearia ações para evitar essas colisões. O artigo da equipe se concentra apenas no modelo de identificação de tratamento, pois o sistema e o planejador de avaliação de ameaças estão além do escopo do artigo.
“Nosso trabalho deve ser visto no contexto da alocação regional de recursos para partes dos dados de percepção, em vez do campo de visão completo de 360°”, disse Henning. “Detalhamos a (bastante óbvia) importância de manter a capacidade de reagir ao ambiente sem ficar restrito ao conhecimento prévio. Nesse contexto, mostramos que implementações já diretas e leves podem melhorar significativamente o tempo de reação possível em possíveis ameaças de colisão.”
Henning e seus colegas avaliaram sua estrutura em uma série de simulações e descobriram que ela poderia melhorar a operação de veículos autônomos em diferentes cenários críticos. Isso inclui cenários em que outro participante do trânsito se aproxima da pista dos veículos de maneiras diferentes.
“A implicação que derivamos é que a segurança não está necessariamente ligada a um sistema de percepção multimodal de 360°, de todos os tempos”, disse Henning. “Em vez disso, a segurança também pode ser alcançada por um sistema de percepção eficiente que se adapta de maneira inteligente e com base no conhecimento do contexto, bem como em informações on-line (e possivelmente até outras fontes de informação) à situação de um agente automatizado”.
A nova estrutura pode eventualmente ser implementada e testada em configurações do mundo real, para aumentar a segurança de veículos autônomos que navegam em ambientes dinâmicos. Enquanto isso, Henning e seus colegas planejam continuar trabalhando em sua abordagem, além de desenvolver novos modelos para aprimorar a condução autônoma e semi-autônoma.
“No futuro, pretendemos seguir o caminho para uma percepção eficiente e segura usando métodos introduzidos para conscientização da situação”, acrescentou Henning. “A identificação da região de ameaça em estágio inicial é apenas um dos componentes necessários para esse sistema, e vários desafios ainda precisam ser enfrentados.”
Publicado em 29/07/2022 17h44
Artigo original:
Estudo original: