



A ESA passou os últimos anos trabalhando para a criação de uma base lunar internacional, algo que servirá como sucessor espiritual da Estação Espacial Internacional (ISS). Para conseguir isso, eles contaram com a ajuda de outras agências espaciais e empreiteiros para desenvolver conceitos para habitats espaciais e métodos de construção, bem como maneiras de fornecer suporte robótico e logístico.
Recentemente, o elemento de desenvolvimento tecnológico da ESA (TDE) assinou contrato com o desenvolvedor de tecnologia francês COMEX para criar o sistema robótico TRAILER. Este projeto de dois anos testará uma nova arquitetura de missão, na qual dois robôs trabalham em conjunto (e com a ajuda de astronautas) para explorar a superfície lunar e construir um posto avançado permanente na Lua.
O sistema TRAILER aproveitará vários avanços recentes nos campos de robótica, operação remota e software de autonomia. Os robôs em tandem são projetados para serem operados da Terra ou de uma base em órbita lunar – ou seja, o Lunar Gateway. No entanto, eles também deverão operar autonomamente por trechos de tempo e executar tarefas sem que os astronautas os supervisionem.
Por fim, o TRAILER foi projetado para testar sistemas robotic explorer que consistem em dois elementos, conhecidos como TRACTOR e WAIN. O primeiro exige um elemento móvel ágil capaz de se aventurar na superfície por curtos períodos de tempo, obter amostras para análise e se comunicar por meio de um transceptor sem fio local.
Enquanto isso, o elemento WAIN consistirá em um trailer ativo que fornecerá uma base de operações para o rover e será limitado em termos de mobilidade e navegação. Isso incluirá uma rede sem fio local para facilitar as comunicações da superfície lunar com a Terra (ou órbita), fornecer energia ao veículo espacial e a si próprio, além de auxiliar nas operações científicas com um laboratório a bordo.
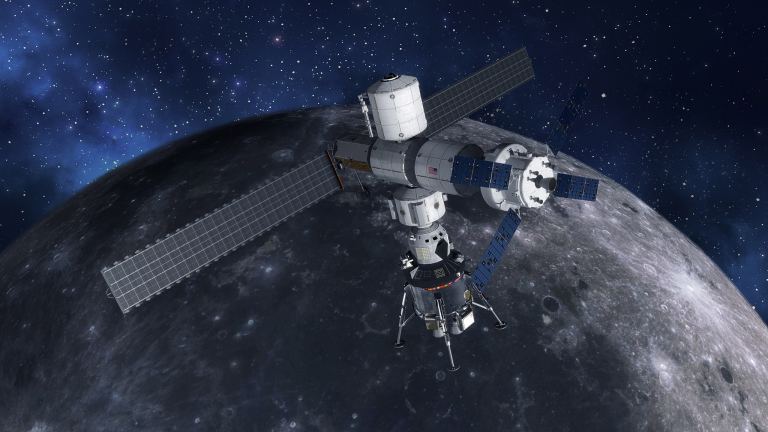
Embora esses robôs pudessem ser controlados desde a Terra, a arquitetura da missão foi projetada com o Lunar Gateway em mente. Este habitat – que está sendo desenvolvido pela NASA, pela ESA e por um consórcio de parceiros internacionais – será o primeiro posto avançado humano além da órbita da Terra e servirá como um acampamento base para operações na superfície lunar.
Isso inclui o retorno da NASA à Lua (Projeto Artemis) e a arquitetura robótica aprimorada por humanos e a capacidade de exploração e ciência lunar (HERACLES) da ESA. E, é claro, existem os planos de longo prazo da ESA, em conjunto com outras agências espaciais e parceiros internacionais, para criar a tão aguardada International Moon Village.
Em todos os casos, o sucesso se resume à cooperação; não apenas entre agências e entre entidades públicas e privadas, mas também entre astronautas e exploradores robóticos. Quando o TRAINER estiver concluído, ele se juntará a várias missões robóticas na Bacia do Pólo Sul-Aitken que estarão explorando recursos que podem ser usados para apoiar operações humanas – aka. Utilização de recursos in situ (ISRU).
A ESA também está atualmente envolvida no desenvolvimento de um novo tipo de infraestrutura de comando e um sistema de controle de força-feedback que permitirá que os astronautas “sintam” o que um rover sente. Como parte dos experimentos Analog-1, o astronauta da ESA, Luca Parmitano, demonstrou com sucesso a capacidade do sistema de controlar um rover na Terra a partir da ISS.
O desenvolvimento do TRAILER será liderado pela COMEX, com o apoio do Centro de Pesquisa Alemão para o Centro de Inovação em Robótica de Inteligência Artificial (DFKI RIC) e da empresa de robótica LIQUIFER Systems Group, sediada em Viena.
Publicado em 02/02/2020
Artigo original:
Achou importante? Compartilhe!


Assine nossa newsletter e fique informado sobre Astrofísica, Biofísica, Geofísica e outras áreas. Preencha seu e-mail no espaço abaixo e clique em “OK”: