



doi.org/10.1109/LRA.2024.3358581
Credibilidade: 999
#Drone
Os veículos aéreos não tripulados (UAV), também conhecidos como drones, já provaram ser ferramentas valiosas para resolver uma ampla gama de problemas do mundo real, que vão desde a monitorização de ambientes naturais e terrenos agrícolas até missões de busca e salvamento e a filmagem de filmes. cenas de cima. Até agora, a maioria desses problemas foi resolvida usando um drone de cada vez, em vez de equipes de vários UAVs autônomos ou semiautônomos.
Em comparação com UAVs individuais, as equipes de UAV poderiam cobrir áreas geográficas mais amplas, capturando mais imagens de cenas específicas ou completando missões desejadas com mais rapidez. Muitos roboticistas e cientistas da computação têm trabalhado em novas tecnologias que poderiam facilitar a implantação e coordenação simultânea de múltiplos UAVs.
Pesquisadores da Universidade Técnica Tcheca em Praga introduziram recentemente um novo método para planejar caminhos de energia mínima para UAVs em equipe, permitindo-lhes cobrir eficientemente os ambientes como uma equipe durante as missões. Este método, introduzido nas Cartas de Robótica e Automação do IEEE, poderia tanto minimizar o consumo de energia das equipes de UAV, considerando a capacidade da bateria dos drones no planejamento de suas trajetórias, quanto otimizar a velocidade de vôo.
“Nosso artigo recente foi inspirado em nossos esforços de pesquisa anteriores em algoritmos de planejamento para planejamento de caminho de cobertura de UAV único e planejamento de inspeção multi-UAV”, disse František Neková?, co-autor do artigo, ao Tech Xplore. “As tarefas de cobertura em grandes áreas externas exigem o uso de vários UAVs devido aos seus tempos de voo e capacidade de bateria limitados. No entanto, as abordagens de planejamento multi-UAV existentes não levaram em conta as restrições de energia diretamente, otimizando o tempo de voo ou a distância percorrida.”
O principal objetivo do trabalho recente de Neková? e seus colegas foi desenvolver um novo modelo computacional que coordenasse as ações de múltiplos UAV, permitindo a cobertura de ambientes com consciência energética durante as missões. Em contraste com muitas outras estruturas de planejamento de equipes de UAV introduzidas no passado, a abordagem proposta considera as velocidades de vôo ideais dos UAVs em uma equipe e suas restrições individuais de bateria.
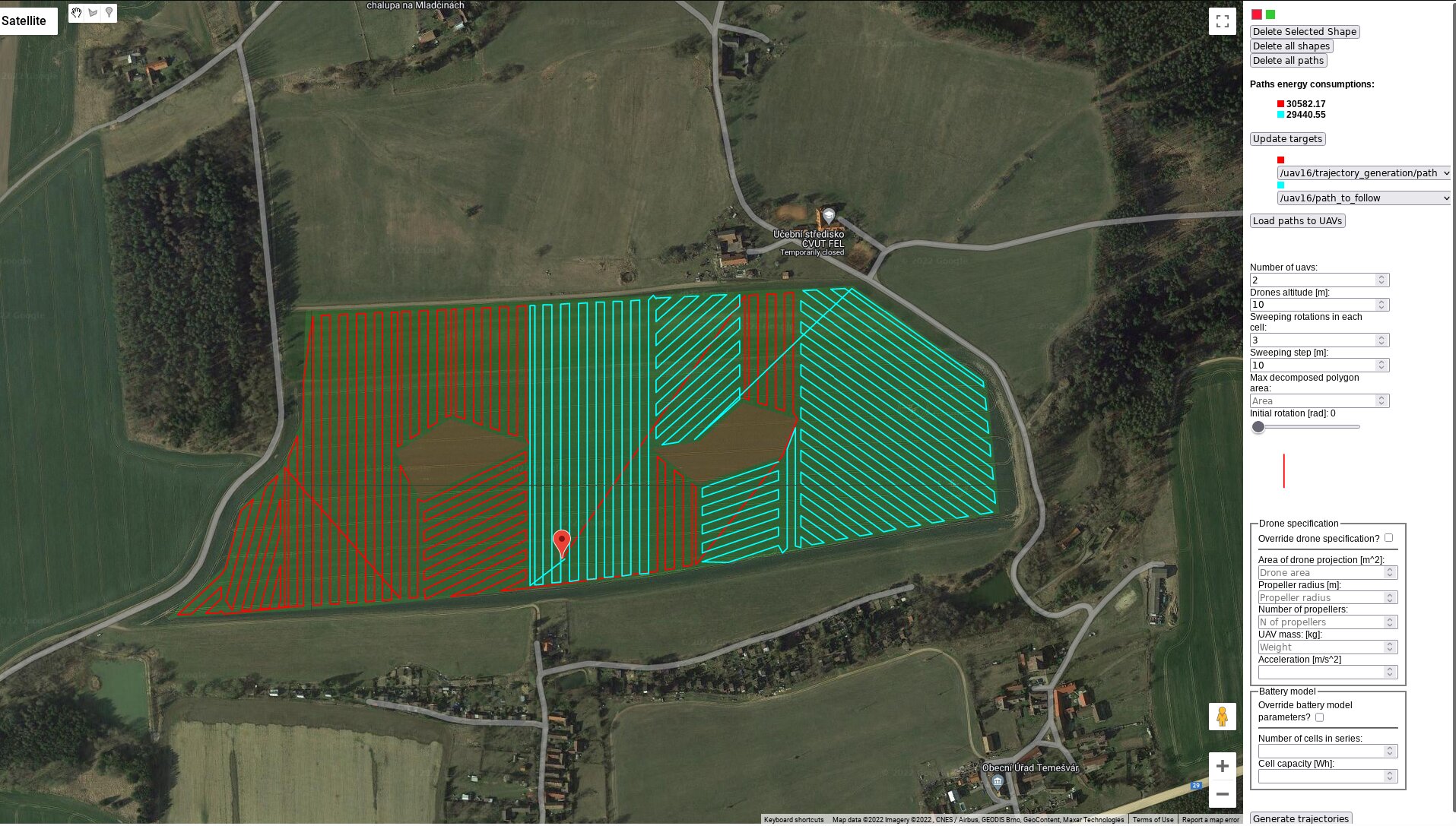
“Nossa abordagem funciona primeiro decompondo a área em células usando uma decomposição de boustrophedon”, explicou Neková?. “Planejamos então padrões de varredura para frente e para trás dentro de cada célula para cobri-la, utilizando a velocidade de vôo ideal para minimizar o consumo de energia por distância.
Para alocar efetivamente células para UAVs individuais em uma equipe e planejar seus planos e ações, como quais locais eles visitarão e em que ordem, os pesquisadores formularam a missão como um problema do caixeiro viajante de conjuntos múltiplos (MS-TSP). Este é um problema matemático que descreve um cenário em que um grupo de vendedores precisa visitar um número de cidades agrupadas em conjuntos, visitando cada conjunto apenas uma vez e depois retornando ao seu local de partida com um custo mínimo de viagem.
“Resolvemos esse problema usando um solucionador meta-heurístico”, disse Neková?. “Durante o planejamento, um algoritmo rápido de estimativa de energia junto com velocidades ideais são usados para minimizar o consumo total de energia e, ao mesmo tempo, atender às restrições da bateria. O planejamento consciente da energia e o uso de velocidades ideais são os principais aspectos exclusivos em comparação com trabalhos anteriores.”
Os investigadores avaliaram a sua abordagem tanto em simulações como numa experiência do mundo real, onde a implantaram numa equipe de drones encarregada de monitorizar uma determinada área geográfica. Notavelmente, descobriu-se que a sua abordagem superou as abordagens anteriores em termos de velocidade de cobertura e consumo de energia, reduzindo a energia gasta pelos drones em até 40,4%.
“Verificamos que a nossa estimativa de energia é, em média, 97% precisa dos valores medidos em voo”, disse Neková?. “Em um experimento de campo, demonstramos a viabilidade de nossa abordagem de planejamento com dois UAVs cobrindo uma área em coordenação”.
No futuro, a nova abordagem introduzida neste estudo recente poderá facilitar a utilização de equipes de UAV em ambientes do mundo real, particularmente para lidar com tarefas que requerem tempos de voo mais longos, tais como a inspeção de infraestruturas, agricultura de precisão e monitorização ambiental. Neková? e seus colegas publicaram seu código subjacente no GitHub, para que outros pesquisadores pudessem em breve implementar e testar seu método em ambientes específicos.
Em seus próximos estudos, os pesquisadores planejam desenvolver ainda mais sua abordagem, permitindo também planejar a cobertura de UAV em 3D e incorporando a incerteza de localização. Eles também desejam incluir a possibilidade de recarregar UAVs individuais durante as missões e trocá-los por sistemas totalmente carregados, pois isso estenderia ainda mais a vida útil geral da bateria da equipe e permitiria seu uso para missões mais longas.
“A integração das capacidades de percepção e mapeamento também permitirá missões de cobertura totalmente autônomas, evitando obstáculos e reconstrução de superfície”, acrescentou Neková?. “Além disso, planejamos adicionar recursos de replanejamento, que melhoram a capacidade do nosso método de lidar com cenários inesperados com obstáculos dinâmicos ou problemas de bateria.
“No geral, ampliar nossa abordagem de planejamento consciente da energia para permitir operações multi-UAV seguras e de longa duração é uma direção estimulante para pesquisas futuras.”
Publicado em 25/03/2024 12h23
Artigo original:
Estudo original: