


Por décadas, pesquisadores em todo o mundo vêm tentando desenvolver robôs que possam ajudar os humanos de forma eficiente e trabalhar ao lado deles enquanto realizam uma variedade de tarefas cotidianas. Para fazer isso de forma eficaz, no entanto, os robôs devem ser capazes de interagir naturalmente com os humanos, incluindo entregá-los e receber objetos deles.
Pesquisadores da NVIDIA desenvolveram recentemente um modelo que pode ser usado para melhorar a capacidade dos robôs de passar e receber naturalmente objetos de agentes humanos. Essa abordagem, introduzida em um documento a ser apresentado no ICRA 2022, é baseada em uma estrutura chamada STORM, que eles apresentaram em um de seus trabalhos anteriores.
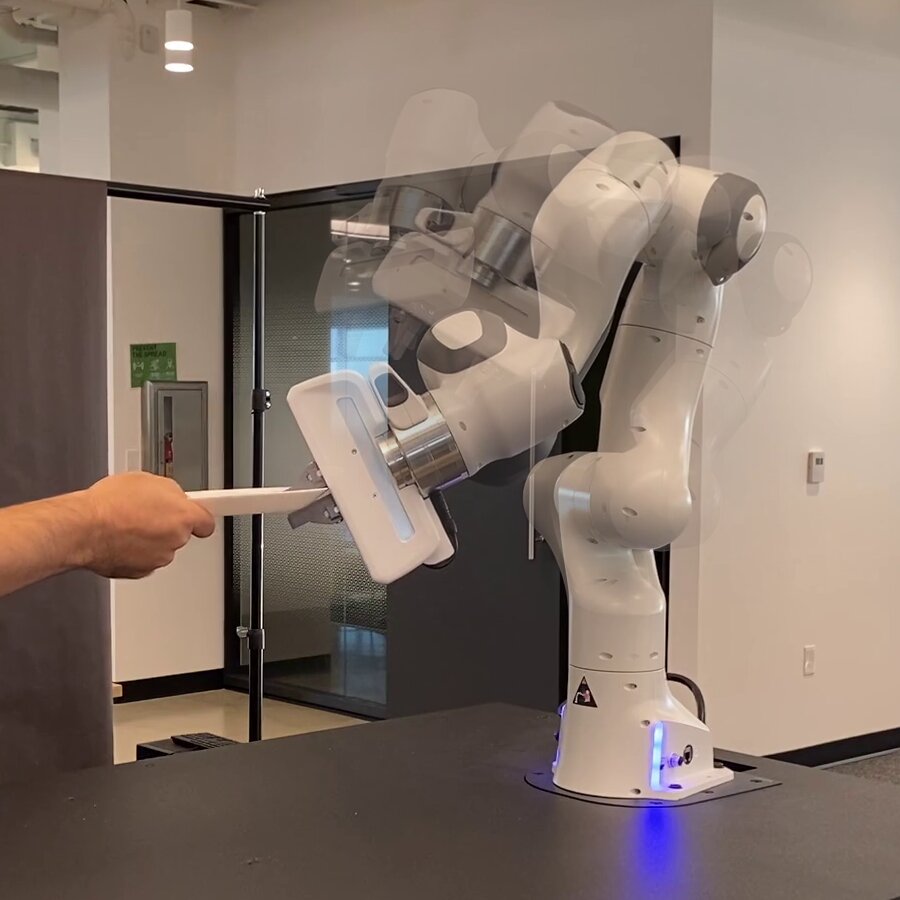
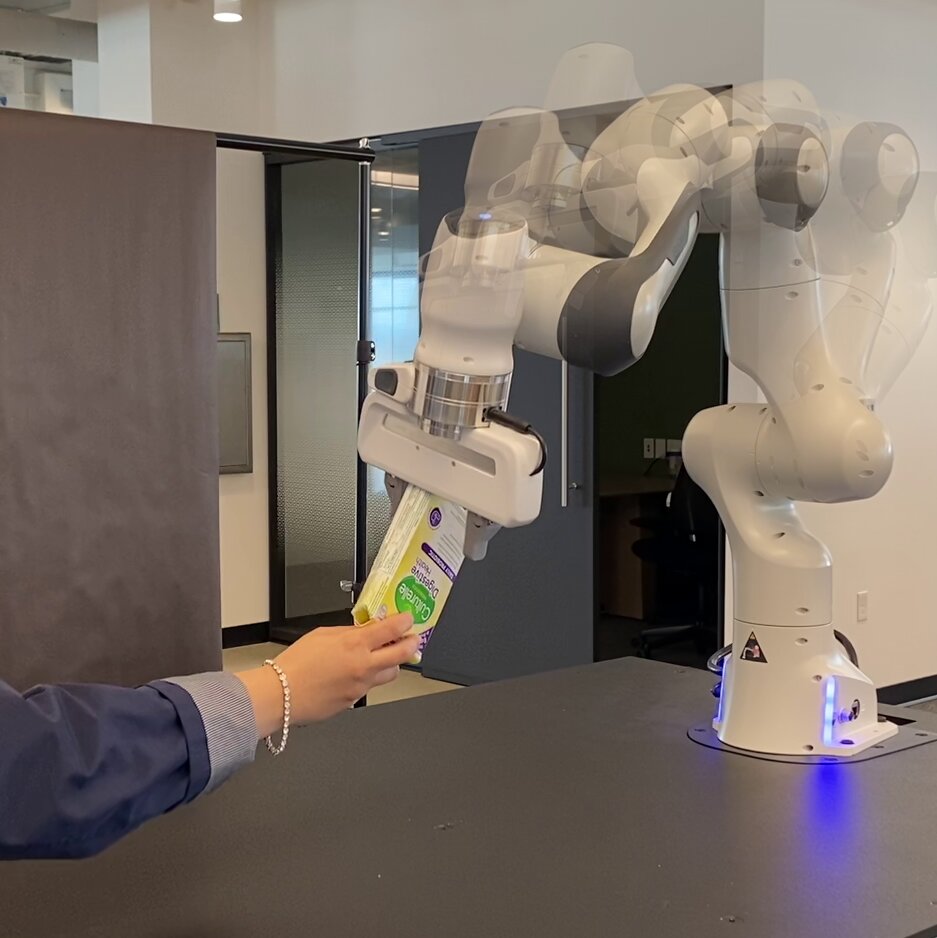
“Neste trabalho, nos concentramos especificamente em garantir que os robôs possam pegar qualquer objeto de um usuário humano”, disse Dieter Fox, um dos pesquisadores que realizaram o estudo, ao TechXplore. “Criamos uma solução que integra uma abordagem aprendida para agarrar com nossa abordagem de controle preditivo, a fim de garantir que essas transferências sejam previsíveis, naturais e rápidas, para que as pessoas vejam o robô como um assistente seguro e útil”.
Fox e seus colegas da NVIDIA vêm trabalhando para melhorar as habilidades de manipulação e interação dos robôs há vários anos. A estrutura do modelo apresentado em seu novo artigo, no entanto, difere das abordagens apresentadas em seus trabalhos anteriores.
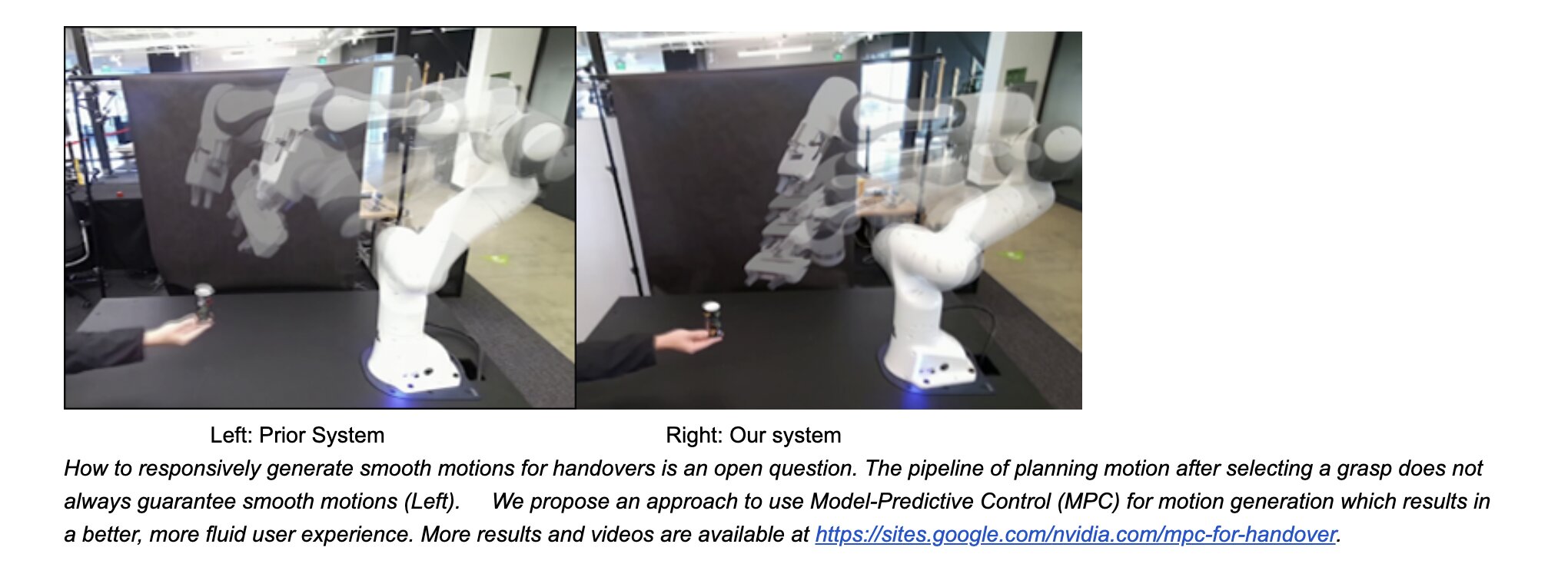
Mais especificamente, sua abordagem recém-apresentada inicialmente usa um modelo aprendido para prever várias maneiras pelas quais o robô poderia pegar um objeto da mão de um agente humano. Então, em vez de usar um algoritmo simples baseado em regras para determinar qual dessas maneiras é mais eficaz, ele identifica a abordagem ideal usando STORM, a estrutura de controle preditivo de modelo (MPC) criada anteriormente pela equipe.
“Nossa abordagem MPC, apelidada de STORM, funciona amostrando muitos movimentos possíveis que o robô poderia fazer a partir do local atual até onde o objeto está”, explicou Fox. “Ele aproveita os cálculos da GPU para avaliar essas trajetórias, permitindo-nos verificar rapidamente 500 delas em paralelo.”
O modelo criado por Fox e seus colegas atualiza as decisões de controle do robô várias vezes por segundo. Isso permite que ele adapte rapidamente a trajetória planejada do robô e suas decisões sobre onde agarrar objetos com base nos movimentos realizados pelo usuário com quem está colaborando.
“Este trabalho mostra como podemos combinar técnicas aprendidas de captura de objetos e rastreamento humano com planejamento de movimento eficiente para gerar um comportamento de robô robusto, confiável e natural”, disse Fox. “Ele fornece uma base para construir todos os tipos de comportamento colaborativo humano-robô.”
Fox e seus colegas avaliaram o desempenho de seu modelo em uma série de experimentos em que robôs entregavam e recebiam uma variedade de objetos enquanto interagiam com quatro usuários humanos. Nesses testes, sua abordagem alcançou resultados muito promissores, pois quase todos os participantes sentiram que o robô era melhor em colaborar com eles quando alimentado pela estrutura MPC dos pesquisadores do que quando era baseado em uma abordagem de linha de base.
No futuro, o novo modelo apresentado por essa equipe da NVIDIA poderá ser usado para melhorar o desempenho de robôs existentes e recém-desenvolvidos em tarefas que envolvem a manipulação de objetos em estreita colaboração com agentes humanos. Enquanto isso, a equipe planeja desenvolver outras ferramentas para aprimorar a colaboração humano-robô.
“Mais amplamente, abordagens como essa que combinam o poder do aprendizado profundo com o raciocínio baseado em planejamento serão úteis para muitas aplicações”, acrescentou Fox. “Em nossos próximos estudos, gostaríamos de explorar sistemas colaborativos humanos-robôs mais gerais para permitir que o robô trabalhe com humanos de forma eficiente, além de explorar a possibilidade de treinar esses sistemas robóticos virtualmente em ambientes simulados e implantar os modelos treinados em ambientes reais. robôs do mundo.”
Publicado em 01/05/2022 09h29
Artigo original: