


Para interagir efetivamente com humanos em ambientes sociais lotados, como shoppings, hospitais e outros espaços públicos, os robôs devem ser capazes de participar ativamente de interações em grupo e individuais. A maioria dos robôs existentes, no entanto, tem um desempenho muito melhor ao se comunicar com usuários individuais do que com grupos de humanos conversando.
Hooman Hedayati e Daniel Szafir, dois pesquisadores da Universidade da Carolina do Norte em Chapel Hill, desenvolveram recentemente uma nova técnica baseada em dados que pode melhorar a forma como os robôs se comunicam com grupos de humanos. Este método, apresentado em um artigo apresentado na Conferência Internacional ACM/IEEE 2022 sobre Interação Humano-Robô (HRI ’22), permite que robôs prevejam as posições de humanos em grupos de conversação, para que eles não ignorem erroneamente uma pessoa quando sua sensores estão total ou parcialmente obstruídos.
“Estar em um grupo de conversação é fácil para humanos, mas desafiador para robôs”, disse Hooman Hedayati, um dos pesquisadores que realizaram o estudo, ao TechXplore. “Imagine que você está conversando com um grupo de amigos, e sempre que um de seus amigos pisca, ela para de falar e pergunta se você ainda está lá. Esse cenário potencialmente irritante é mais ou menos o que pode acontecer quando um robô está em grupos de conversação.”
Uma das razões pelas quais muitos robôs ocasionalmente se comportam mal enquanto participam de uma conversa em grupo é que suas ações dependem muito de dados coletados por seus sensores (ou seja, câmeras, sensores de profundidade etc.). Os sensores, no entanto, são propensos a erros e, às vezes, podem ser obstruídos por movimentos bruscos e obstáculos nos arredores do robô.
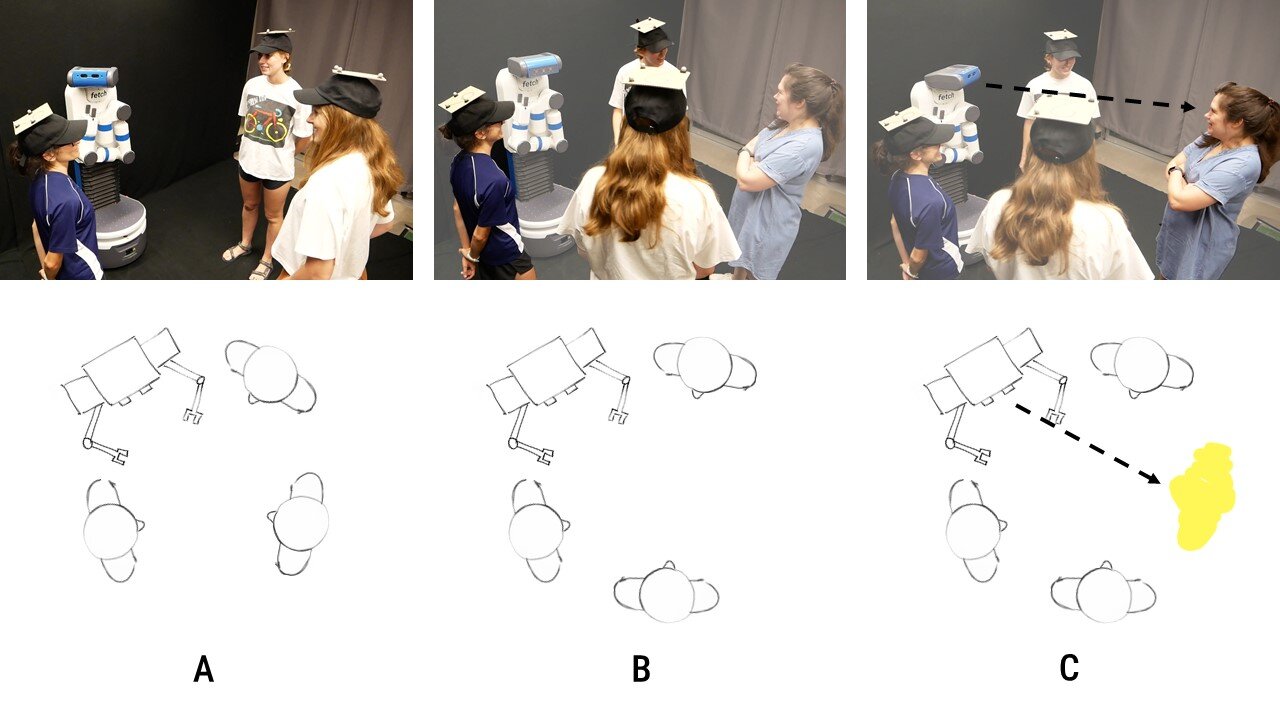
“Se a câmera do robô for mascarada por um obstáculo por um segundo, da mesma forma que quando as pessoas piscam, o robô pode não ver essa pessoa e, como resultado, ignora o usuário”, explicou Hedayati.
“Com base na minha experiência, os usuários acham esses comportamentos inadequados perturbadores. O objetivo principal do nosso projeto recente era ajudar os robôs a detectar e prever a posição de uma pessoa não detectada dentro do grupo de conversação”.
Para prever a posição das pessoas em um grupo de conversação, Hedayati e Szafir desenvolveram primeiro um algoritmo que verifica as crenças de um robô sobre quem faz parte do grupo e quem não faz. Esse algoritmo pode detectar os erros de um robô (ou seja, se ele está ignorando a existência de uma ou mais pessoas em um grupo de conversação). Posteriormente, ele prevê a posição do usuário/usuários não detectados analisando os dados disponíveis.
“Nossa abordagem é baseada em uma de nossas observações anteriores”, explicou Hedayati. “Especificamente, enquanto estávamos limpando o ‘Babble dataset’ (um conjunto de dados de grupos conversacionais humano-humano), descobrimos que as pessoas tendem a permanecer em posições predefinidas em relação umas às outras. Isso significa que, se soubermos a posição de todas as pessoas em uma conversa, grupo, exceto por um, podemos prever sua posição.”
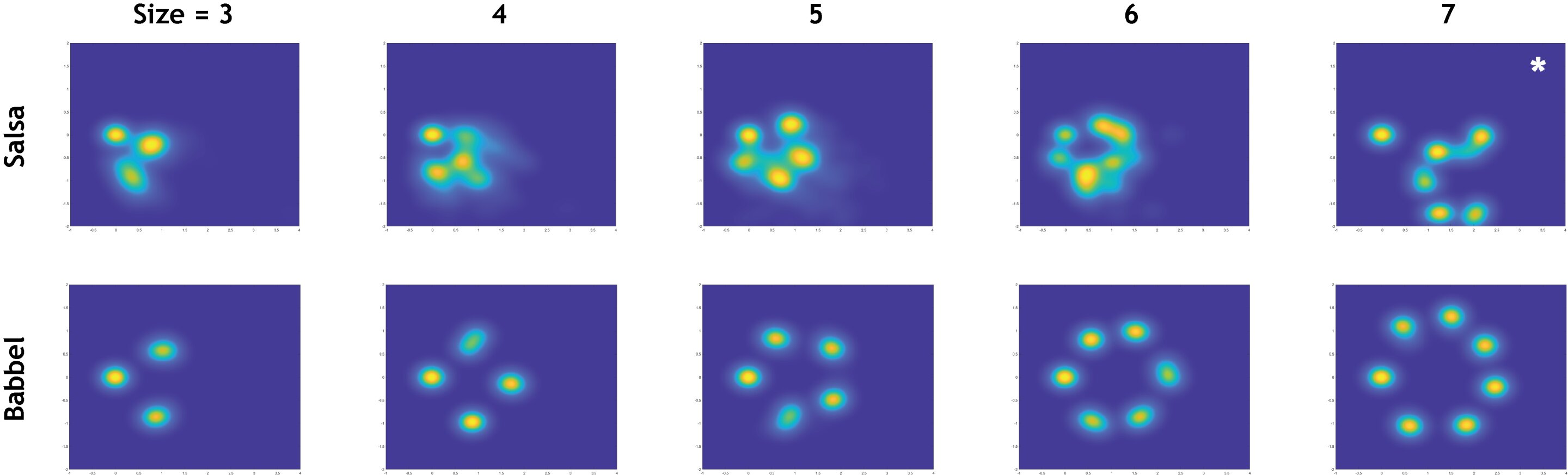
A técnica desenvolvida por Hedayati e Szafir foi treinada em uma série de conjuntos de dados existentes, contendo imagens anotadas de grupos de usuários humanos conversando entre si. Ao analisar as posições de outros alto-falantes em um grupo, ele pode prever com precisão a posição de um usuário não detectado.
“Mostramos que podemos modelar comportamentos humanos para robôs para que eles tenham uma melhor compreensão da dinâmica dos grupos de conversação”, disse Hedayati.
No futuro, a nova abordagem introduzida por essa equipe de pesquisadores pode ajudar a aprimorar as habilidades de conversação de robôs existentes e recém-desenvolvidos. Isso, por sua vez, pode torná-los mais fáceis de implementar em grandes espaços públicos, incluindo shoppings, hospitais e hospitais.
“Estamos dedicados a melhorar os grupos de conversação humano-robô e há muitos problemas interessantes em aberto neste campo (por exemplo, como detectar quem é o falante ativo, onde os robôs devem ficar em um grupo, como ingressar em um grupo etc.). )”, acrescentou Hedayati. “O próximo passo para nós será melhorar o comportamento de olhar dos robôs em um grupo de conversação. As pessoas acham robôs com um comportamento de olhar melhor mais inteligentes (por exemplo, robôs que sabem quem está falando e olhando para ele). Queremos melhorar o comportamento do olhar dos robôs e tornar o grupo de conversação humano-robô mais agradável para os humanos.”
Publicado em 06/04/2022 11h59
Artigo original:
Estudo original: