


Uma equipe de pesquisadores do Centro de Visão, Cognição, Aprendizagem e Autonomia (VCLA) da Universidade da Califórnia em Los Angeles (UCLA), liderada pelo Prof. Song-Chun Zhu, desenvolveu recentemente uma abordagem que pode ajudar a alinhar um avaliação do usuário do que um robô pode fazer com suas verdadeiras capacidades. Essa abordagem, apresentada em um artigo publicado no IEEE Robotics and Automation Letters, é baseada em um novo algoritmo que otimiza simultaneamente o custo físico e a expressividade do movimento de um robô, para determinar quão bem observadores humanos estimariam seu espaço de trabalho alcançável.
“Na sociedade humana, as pessoas têm papéis diferentes com base em seus conhecimentos e capacidades”, disse Xiaofeng Gao, um dos pesquisadores que realizaram o estudo, ao TechXplore. “Tais atribuições de função com reconhecimento de capacidade permitem que os humanos colaborem uns com os outros de forma mais eficiente. Acreditamos que, quando os humanos estão trabalhando com robôs, é igualmente importante que eles entendam a capacidade do robô, pois uma falha em fazê-lo pode afetar sua confiança em e aceitação de robôs.”
Gao e seus colegas acham que é crucial que os humanos sejam capazes de estimar com precisão as capacidades de um robô. Na verdade, se um usuário subestima as habilidades de um robô, ele pode não usá-lo; mas se a superestimar, poderá se decepcionar ou usá-la em situações em que possa causar erros críticos.
O principal objetivo do estudo dos pesquisadores foi ajudar os humanos a obter uma boa compreensão do espaço de trabalho alcançável de um robô, por meio de um processo de calibração de capacidade que envolve várias demonstrações de movimento. Além disso, a equipe queria explorar até que ponto medir com precisão a capacidade dos robôs poderia ajudar os humanos a atribuir papéis adequados a eles em tarefas de colaboração.
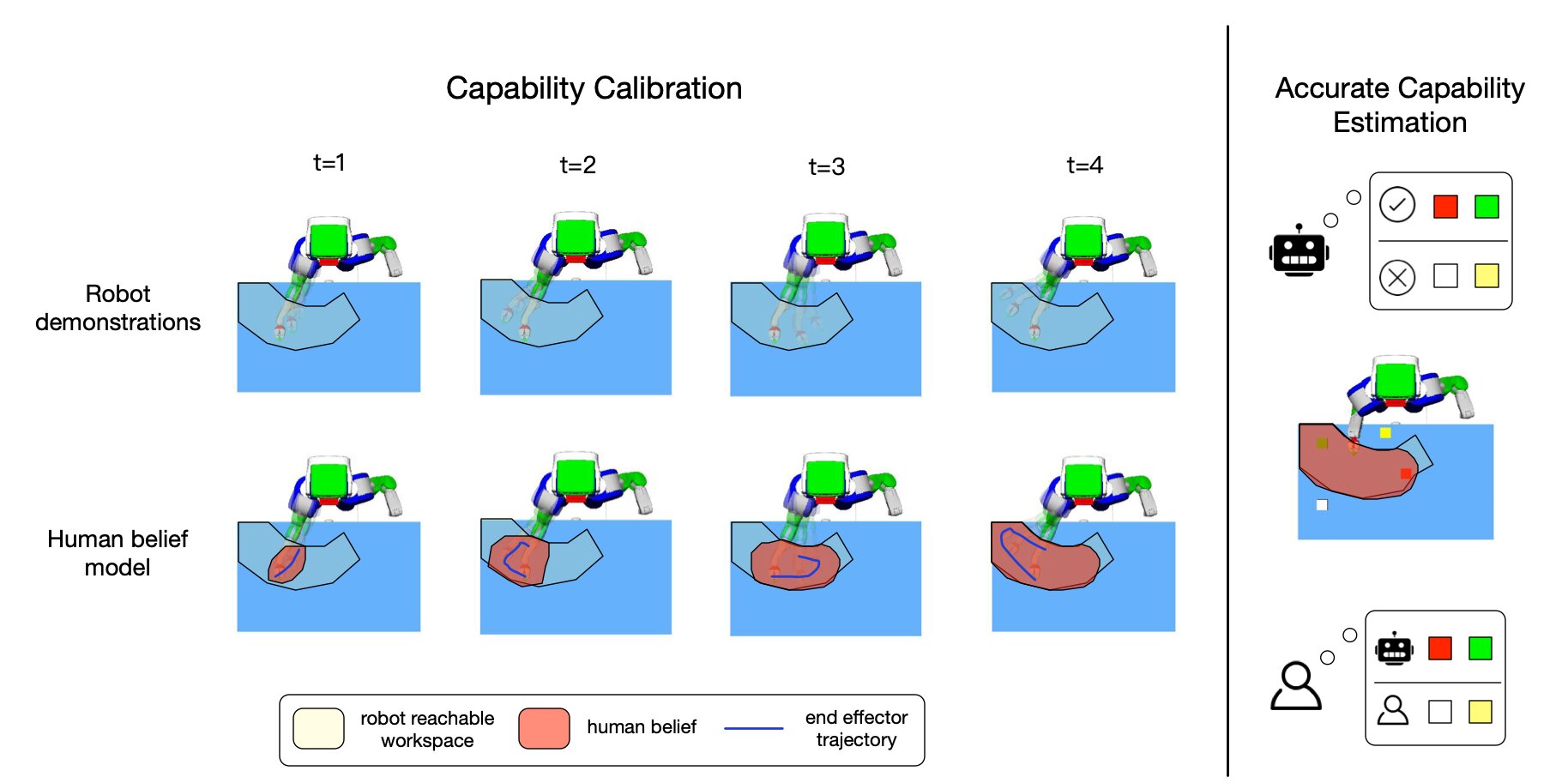
“Nós propomos o planejamento de movimento expressivo de acessibilidade (REMP), um algoritmo que gera demonstrações de movimento expressivo para calibrar a acessibilidade percebida do robô por meio de otimização de trajetória”, explicou Gao. “Uma característica única do REMP é que ele modela como a crença humana no espaço de trabalho acessível do robô muda após cada trajetória. para alcançar uma calibração decente.”
Gao e seus colegas avaliaram seu algoritmo em uma série de experimentos envolvendo participantes humanos. Nesses testes, eles compararam seu desempenho com o de dois métodos de linha de base que utilizam movimentos funcionais puros e trajetórias que atravessam aleatoriamente como demonstrações. Notavelmente, eles descobriram que seu método poderia melhorar significativamente a estimativa dos usuários do espaço de trabalho alcançável de um robô, além de melhorar a colaboração humano-robô.
“Estamos entusiasmados em ver que, ao usar nosso método, os usuários percebem o robô de forma mais positiva, pois o robô é considerado mais confiável, mais previsível e mais fácil de entender”, disse Gao. “Esses resultados destacam a necessidade de construir máquinas inteligentes que estejam cientes das pessoas com quem trabalham e nos ajudem a imaginar um futuro melhor, onde humanos e IAs possam trabalhar juntos”.
O recente projeto realizado por esta equipe de pesquisadores foi financiado pela bolsa DARPA Explainable Artificial Intelligence (XAI). No futuro, o algoritmo que eles desenvolveram pode ajudar a aprimorar as habilidades de colaboração de sistemas robóticos existentes e recém-desenvolvidos.
Enquanto a equipe conduzia seus experimentos on-line, eles só podiam investigar o desempenho de seu algoritmo em um plano 2D. Em seus próximos estudos, no entanto, eles planejam desenvolver ainda mais seu método, garantindo que ele também possa ser aplicado em ambientes 3D.
“Como alcançar é uma das tarefas mais básicas na interação humano-robô, acreditamos que entender a acessibilidade ajuda muito os usuários a entender as capacidades do robô em diferentes tarefas”, acrescentou Gao. “Vemos nosso trabalho como um primeiro passo bem-sucedido em direção a uma configuração de calibração de capacidade mais geral. Agora também estamos interessados em usar uma variedade de outras modalidades (por exemplo, fala, gesto) como meio de recursos de comunicação.”
Publicado em 26/02/2022 23h48
Artigo original: