


Os engenheiros de Cambridge mostraram como um braço robótico pode controlar a jornada de um objeto flutuante remotamente, manipulando as ondas da superfície na água. Usando avanços recentes no aprendizado de reforço profundo – um campo de inteligência artificial (IA) mais adequado para gerenciar a tomada de decisões complexas – a equipe criou uma maneira de modelar as interações de fluidos, fornecendo uma abordagem orientada por dados para resolver um fluido complexo problema de dinâmica.
O controle remoto de objetos flutuantes em uma superfície fluida tem inúmeras aplicações em pequenas escalas (por exemplo, na manipulação de células), grandes escalas (por exemplo, na coleta de detritos flutuantes de pequenos corpos d’água) e em aplicações médicas (incluindo a transferência de secções de tecido em lâminas de microscópio para diagnóstico). No entanto, as interações de fluido subjacentes são extremamente difíceis de modelar. Seus comportamentos são governados por uma interação complexa de vários fatores externos e forças internas que não podem ser previstas matematicamente com segurança.
Ao usar a precisão e a repetibilidade dos dispositivos robóticos, juntamente com o aprendizado profundo e a experimentação do mundo real em uma configuração de laboratório, a equipe de pesquisa do Laboratório de Robótica Inspirada em Bio (BIRL) do Departamento conseguiu resolver esse problema. Eles desenvolveram uma estrutura de controle que pode transportar objetos flutuantes de um local para outro. O braço robótico aprende a controlar o caminho percorrido pelo objeto flutuante usando tentativa e erro. Um ‘agente inteligente’ ensinado pelo aprendizado por reforço determina a melhor estratégia. Os resultados são publicados na revista Scientific Reports.
Fumiya Iida, professor de robótica, disse: “O que nos inspirou a iniciar esta pesquisa foi testemunhar técnicos de hospitais navegando em amostras biológicas flutuantes na água durante a preparação de lâminas de microscópio para diagnóstico de câncer. Esta é uma tarefa muito difícil para os robôs de hoje, mas por meio de nosso projeto de pesquisa, demos um passo mais perto de resolver isso, automatizando o que apenas técnicos humanos qualificados podem fazer.”
Dr. Thomas George Thuruthel, pesquisador associado em sensoriamento robótico suave e auto-cura, disse: “Dispositivos especializados são usados atualmente para manipulação remota de pequena escala de objetos flutuantes. Normalmente, eles usam sinais magnéticos ou ópticos para manipulação remota. No entanto, isso acrescenta restrições na configuração, por exemplo, e o tipo de materiais que podem ser controlados.
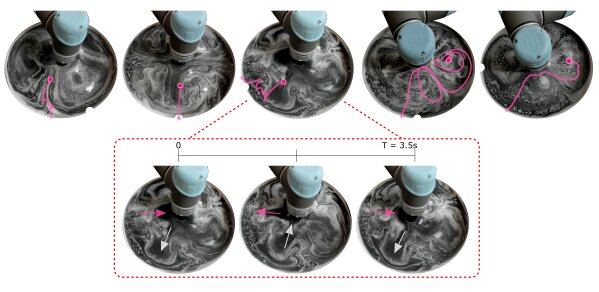
“Apresentamos uma abordagem em que tarefas repetitivas são executadas por um braço robótico sem a necessidade de feedback extensivo. Usamos um manipulador robótico para excitar periodicamente a água remotamente (semelhante a um cachorro remando para pegar sua bola de tênis da piscina), para gerar fluxos de superfície para mover objetos de qualquer local inicial para um local de destino especificado – e testado em uma rotação de 0°, 90° e 180°. Descobrimos que à medida que o ângulo e o comprimento do caminho aumentam, a trajetória observada se torna mais imprevisível, no entanto, em média, o objeto pode ser transportado para o local desejado.”
David Hardman, estudante de pesquisa, disse: “Gostaríamos de ampliar nossa configuração substituindo-a por sensores ultrassônicos ou LiDAR (uma tecnologia de sensoriamento remoto). Isso é possível porque a única informação necessária para o aprendizado por reforço é a posição inicial do objeto flutuante e o erro final do alvo. No futuro, também gostaríamos de explorar sua aplicação potencial para manipulação de detritos e derramamento de óleo. Há, no entanto, um longo caminho a percorrer antes que isso possa ser testado e validado nessas aplicações do mundo real.”
Publicado em 31/01/2022 11h45
Artigo original:
Estudo original: