


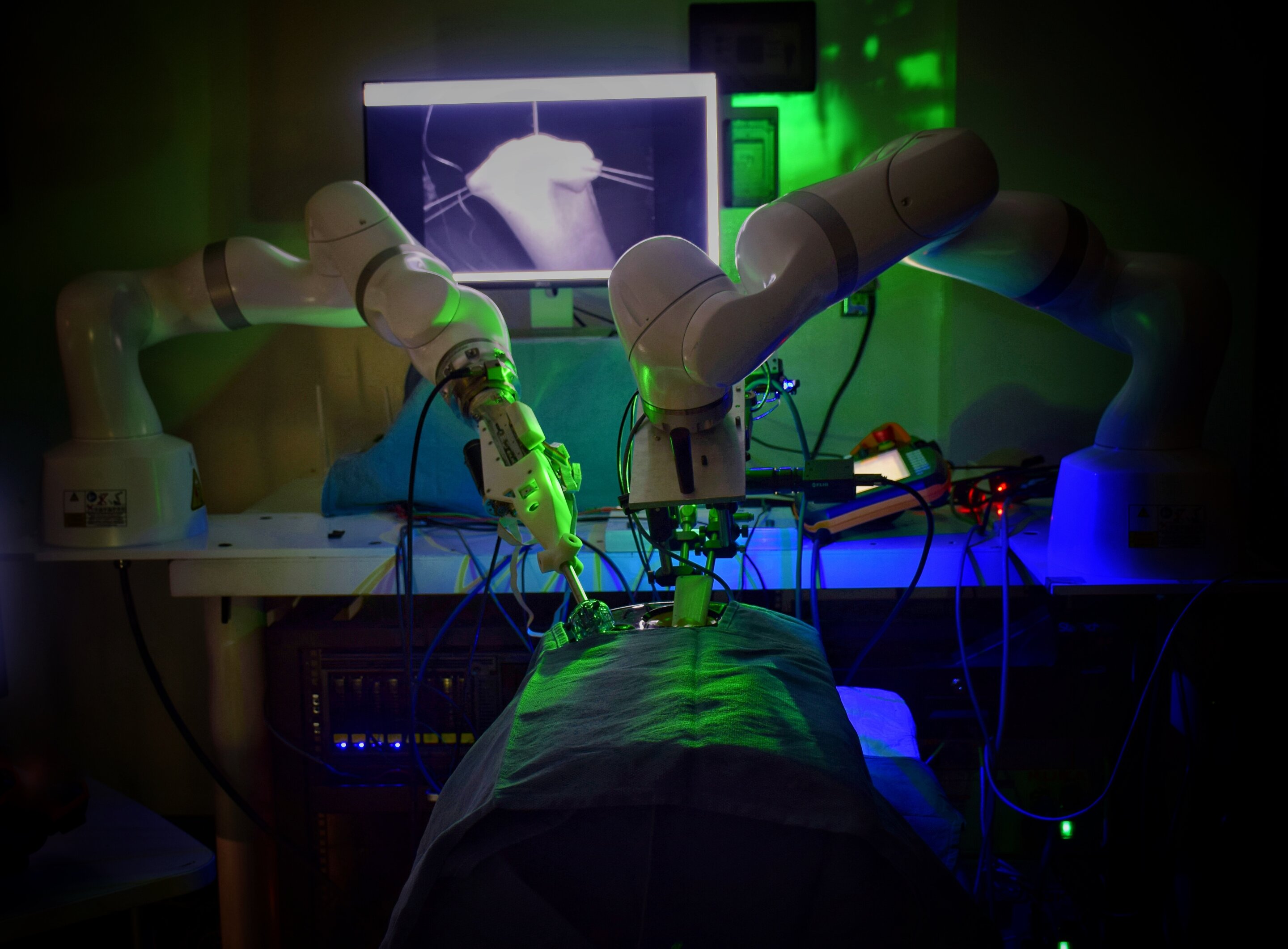
Um robô realizou uma cirurgia laparoscópica no tecido mole de um porco sem a mão guia de um humano – um passo significativo na robótica em direção à cirurgia totalmente automatizada em humanos. Projetado por uma equipe de pesquisadores da Universidade Johns Hopkins, o Smart Tissue Autonomous Robot (STAR) é descrito hoje na Science Robotics.
“Nossas descobertas mostram que podemos automatizar uma das tarefas mais intrincadas e delicadas da cirurgia: a reconexão de duas extremidades de um intestino. O STAR realizou o procedimento em quatro animais e produziu resultados significativamente melhores do que os humanos realizando o mesmo procedimento,” disse o autor sênior Axel Krieger, professor assistente de engenharia mecânica na Whiting School of Engineering de Johns Hopkins.
O robô se destacou na anastomose intestinal, procedimento que exige alto nível de movimentos repetitivos e precisão. Conectar duas extremidades de um intestino é sem dúvida o passo mais desafiador na cirurgia gastrointestinal, exigindo que um cirurgião suture com alta precisão e consistência. Mesmo o menor tremor da mão ou ponto mal colocado pode resultar em um vazamento que pode ter complicações catastróficas para o paciente.
Trabalhando com colaboradores do Hospital Nacional Infantil em Washington, DC e Jin Kang, professor de engenharia elétrica e de computação da Johns Hopkins, Krieger ajudou a criar o robô, um sistema guiado por visão projetado especificamente para suturar tecidos moles. Sua iteração atual avança um modelo de 2016 que reparava os intestinos de um porco com precisão, mas exigia uma grande incisão para acessar o intestino e mais orientação de humanos.
A equipe equipou o STAR com novos recursos para maior autonomia e precisão cirúrgica aprimorada, incluindo ferramentas de sutura especializadas e sistemas de imagem de última geração que fornecem visualizações mais precisas do campo cirúrgico.
A cirurgia de tecidos moles é especialmente difícil para os robôs devido à sua imprevisibilidade, forçando-os a se adaptarem rapidamente para lidar com obstáculos inesperados, disse Krieger. O STAR tem um novo sistema de controle que pode ajustar o plano cirúrgico em tempo real, assim como um cirurgião humano faria.
“O que torna o STAR especial é que é o primeiro sistema robótico a planejar, adaptar e executar um plano cirúrgico em tecidos moles com intervenção humana mínima”, disse Krieger.
Um endoscópio tridimensional baseado em luz estrutural e algoritmo de rastreamento baseado em aprendizado de máquina desenvolvido por Kang e seus alunos orienta o STAR. “Acreditamos que um sistema avançado de visão de máquina tridimensional é essencial para tornar os robôs cirúrgicos inteligentes mais inteligentes e seguros”, disse Kang.
À medida que o campo médico avança em direção a abordagens mais laparoscópicas para cirurgias, será importante ter um sistema robótico automatizado projetado para auxiliar esses procedimentos, disse Krieger.
“A anastomose robótica é uma maneira de garantir que as tarefas cirúrgicas que exigem alta precisão e repetibilidade possam ser realizadas com mais exatidão e precisão em cada paciente, independentemente da habilidade do cirurgião”, disse Krieger. “Nós hipotetizamos que isso resultará em uma abordagem cirúrgica democratizada para o atendimento ao paciente com resultados mais previsíveis e consistentes para os pacientes”.
A equipe de Johns Hopkins também incluiu Hamed Saeidi, Justin D. Opfermann, Michael Kam, Shuwen Wei e Simon Leonard. Michael H. Hsieh, diretor de Urologia Transitória do Hospital Nacional Infantil, também contribuiu para a pesquisa.
Publicado em 27/01/2022 15h54
Artigo original:
Estudo original: