


O número de robôs móveis colaborativos introduzidos em configurações do mundo real está aumentando gradualmente, com aproximadamente 20.000 novas instalações por ano. Para que seu uso aumente ainda mais, no entanto, os roboticistas devem garantir que esses robôs sejam eficientes e seguros para uso em humanos.
Pesquisadores do Instituto Skolkovo de Ciência e Tecnologia (Skoltech) criaram recentemente o CoHaptics, um sistema que mescla robótica colaborativa e tecnologia háptica para melhorar a segurança da colaboração humano-robô. Este sistema, apresentado em um artigo pré-publicado no arXiv, pode rastrear os movimentos dos usuários humanos usando a tecnologia de rastreamento manual e fornecer feedback tátil para alertá-los sobre potenciais colisões com robôs.
“Os robôs colaborativos são projetados para serem seguros para humanos e são equipados com sensores de força / torque”, disse Dzmitry Tsetserukou, professor associado e chefe do Laboratório de Robótica Espacial Inteligente, ao TechXplore. “No entanto, eles normalmente só param de se mover depois que uma colisão com objetos é detectada, o que significa que ainda podem ser perigosos para partes sensíveis do corpo, como os dedos, pulso, pescoço e cabeça de um usuário. Este é um dos motivos pelos quais eles não são amplamente usados para tarefas colaborativas de robô humano, mas apenas substituem robôs industriais em algumas tarefas específicas, como paletização, inspeção de qualidade, montagem, etc. ”
Nos últimos anos, o uso de robôs tornou-se particularmente difundido na indústria e nos setores de serviços. Para aumentar sua segurança e eficiência, no entanto, os roboticistas devem desenvolver técnicas de colaboração que considerem tanto a destreza de que os humanos são capazes quanto a força ou poder dos robôs.
“Por exemplo, se você trabalha em uma linha de montagem, onde os elementos para montar os produtos são pesados ou diferentes peças pequenas são usadas, um robô colaborativo pode ajudá-lo a pegar as peças pesadas e trazê-lo para perto do local de montagem das peças , “Miguel Altamirano Cabrera, Ph.D. aluno envolvido no desenvolvimento de CoHaptics, disse TechXplore. “No entanto, o robô está trabalhando junto com você, e algumas colisões podem ocorrer quando seu corpo interfere no caminho do robô.”
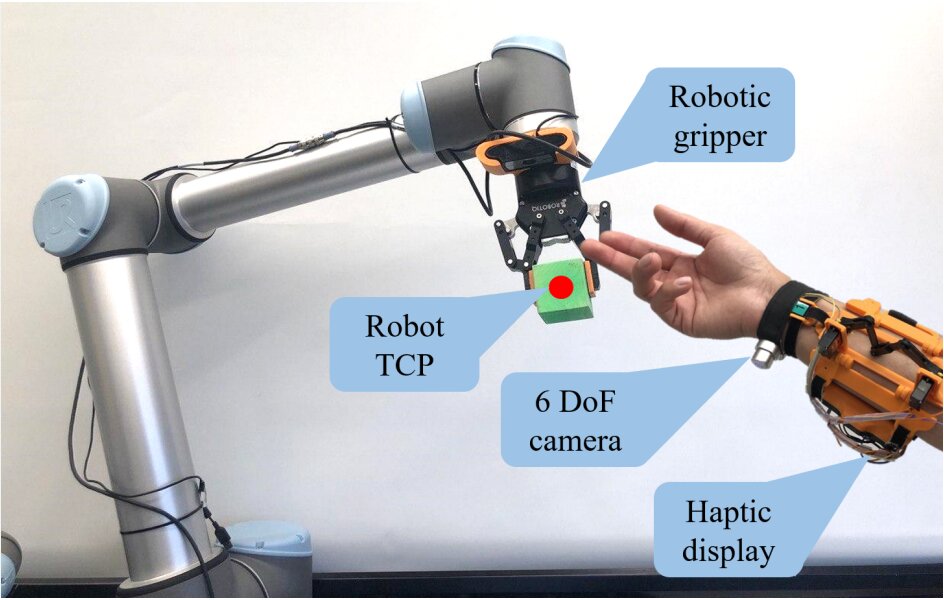
Para reduzir as colisões entre robôs e humanos, Tsetserukou, Altamirano Cabrera e seus colegas usaram um sistema de rastreamento baseado em uma câmera 6 DoF que pode ser usada pelos usuários em seus pulsos. Esta câmera coleta dados que podem ser usados pelo robô para inferir a localização de trabalhadores humanos em sua proximidade e evitar colisões com eles.
Para avaliar seu sistema, Tsetserukou, Altamirano Cabrera e seus colegas realizaram um experimento inicial, onde um humano e um robô completavam tarefas em um ambiente compartilhado. Nesse experimento, eles também compararam o tempo necessário para concluir tarefas quando o usuário humano estava usando seu sistema baseado em feedback tátil com o tempo de operação quando o usuário não estava usando o sistema.
Os pesquisadores descobriram que, nos casos em que o sistema robótico estava ciente da posição do usuário, seu sistema reduziu as colisões com o robô e aumentou a segurança da interação humano-robô. Porém, o robô demorou mais para cumprir sua missão, principalmente porque se desviou de seu caminho para evitar colisões com o usuário.
“Para resolver este problema, também fornecemos aos usuários um ‘sinal de alerta’ quando ele está próximo ao robô, alertando-os sobre potenciais colisões,” Altamirano Cabrera “Este sinal foi dado por estimulação tátil no antebraço por um ponto de contato deslizante , representando a distância do robô. ”
Além de adaptar o caminho de um robô para reduzir colisões com humanos, os pesquisadores adicionaram um recurso tátil ao seu sistema que informa os usuários humanos sobre possíveis colisões futuras com robôs com antecedência. A suposição deles era que, enquanto trabalhavam em uma linha de montagem ou em ambientes industriais, os humanos podem estar tão concentrados nas tarefas que podem não estar prestando atenção aos robôs próximos.
“Felizmente, temos uma sensação de toque, então este é o canal pelo qual decidimos transmitir o risco de colisão aos humanos”, disse Tsetserukou. “Desenvolvemos uma tela tátil chamada RecyGlide que gera estímulos táteis de acordo com a distância entre a mão de um humano e a mão de um robô. Quando os humanos experimentam feedback tátil, eles podem mover a mão para evitar colisões com o robô.”
Em suas avaliações de sistema, os pesquisadores descobriram que os usuários responderam ao feedback tátil fornecido por seu sistema em um tempo médio de 0,32 segundos, que é rápido o suficiente para evitar uma possível colisão. Para aumentar ainda mais a segurança da colaboração robô-humano, eles também desenvolveram um algoritmo chamado campo de potencial tátil.
O algoritmo de campo do potencial háptico foi projetado para alterar a trajetória de um robô de uma forma que o impeça de colidir com humanos, sem interromper sua missão e, portanto, continuar a se mover em direção a um objeto alvo. Por meio desse algoritmo, o sistema CoHaptics pode usar as informações coletadas pela câmera 6DoF usada pelos usuários em seus pulsos para modificar o caminho dos robôs e evitar colisões.
“Nossos resultados mostraram que as informações fornecidas aos usuários pela estimulação háptica aumentaram a distância humano-robô em 4,1 cm (de 12,39 para 16,55), e a trajetória do robô foi reduzida em 81%”, disse Altamirano Cabrera. “A partir desses resultados, podemos concluir que a implementação da estimulação háptica para informar os usuários sobre a sua distância ao robô em uma tarefa colaborativa pode aumentar a segurança dos usuários”.
No futuro, o CoHaptics pode provar ser um sistema altamente valioso para aumentar a segurança dos trabalhadores que trabalham ao lado de robôs móveis em ambientes industriais. Enquanto isso, Tsetserukou, Altamirano Cabrera e seus colegas planejam desenvolver novas abordagens que possam aprimorar ainda mais a colaboração humano-robô.
Como parte de seu trabalho atual, a equipe está trabalhando na construção de um ambiente 3D, batizado de Coverse (universo colaborativo), que representa uma fábrica onde robôs e trabalhadores podem ser rastreados e animados em tempo real. Eles também podem, eventualmente, criar representações semelhantes para ambientes urbanos ou outras configurações onde os robôs podem ser implantados.
“A representação 3D que estamos criando aparece em uma escala gradiente de verde (seguro) a vermelho (perigo)”, disse Tsetserukou. “Quando parte do corpo humano está na proximidade de um robô, o usuário próximo recebe feedback de toque, para evitar possíveis ferimentos. Este universo colaborativo 3D potencialmente tornará o ambiente da fábrica e da cidade habitada por humanos e robôs mais seguro e natural. Pode-se imaginar o cenário em que você receberá um feedback tátil quando o robô de entrega ao ar livre estiver se aproximando de você da zona cega. Além disso, os usuários podem experimentar a localização do pacote transportado pelo robô móvel diretamente na pele em tempo real com um entrega radar háptico para encontrar o veículo espacial a tempo. ”
Publicado em 31/10/2021 11h58
Artigo original:
Estudo original: