



Para operar com eficiência em ambientes urbanos, os robôs móveis e outros sistemas autônomos devem ser capazes de se mover com segurança nas calçadas e evitar colisões com pedestres ou outros obstáculos. Isso é particularmente verdadeiro para robôs de entrega ou sistemas especificamente programados para patrulhar ambientes urbanos.
Pesquisadores do Instituto de Tecnologia da Geórgia e da Universidade de Stanford desenvolveram recentemente o AlienGo, um robô quadrúpede que pode seguir rotas específicas geradas por serviços de mapas públicos enquanto permanece nas calçadas e evita colisões com obstáculos ou humanos. Este robô, apresentado em um artigo pré-publicado no arXiv, é baseado em uma nova estrutura de aprendizagem em duas fases de alto desempenho para navegação segura em calçadas.
“Como parte deste projeto, desenvolvemos um robô quadrúpede inteligente que pode navegar nas calçadas do mundo real”, disse Sehoon Ha, um dos pesquisadores que realizou o estudo, ao TechXplore. “Nosso trabalho é inspirado em duas vertentes do trabalho existente: direção autônoma e navegação interna de robôs. No entanto, como a navegação em calçadas externas geralmente ocorre em ambientes não estruturados com uma grande variedade de pedestres e obstáculos sem faixas de guia, também propusemos um conjunto de técnicas de aprendizagem e algoritmos para resolver esses desafios específicos. ”
Inicialmente, a equipe treinou uma rede neural artificial para navegar em ambientes simples de calçada em simulações. Este primeiro algoritmo, apelidado de “especialista”, foi treinado usando um simulador de mundo saliente de alta velocidade e teve acesso ao chamado “estado privilegiado” da simulação.
Posteriormente, essa rede “especialista” transferiu o comportamento aprendido para um algoritmo de “aluno” em uma simulação de alta fidelidade. No final das contas, essa rede de “alunos” produziu observações realistas de sensores que se assemelhavam a imagens de calçadas do mundo real.
“O ‘aluno’ usa uma rede de recursos semânticos treinados para gerar abstrações que mais tarde são usadas para controlar o robô”, disse Maks Sorokin, outro pesquisador envolvido no estudo, ao TechXplore. “Esta abordagem é baseada em nossa experiência de que o comportamento desejado é difícil de obter usando um treinamento ingênuo de ponta a ponta, simplesmente porque o problema é muito difícil.”
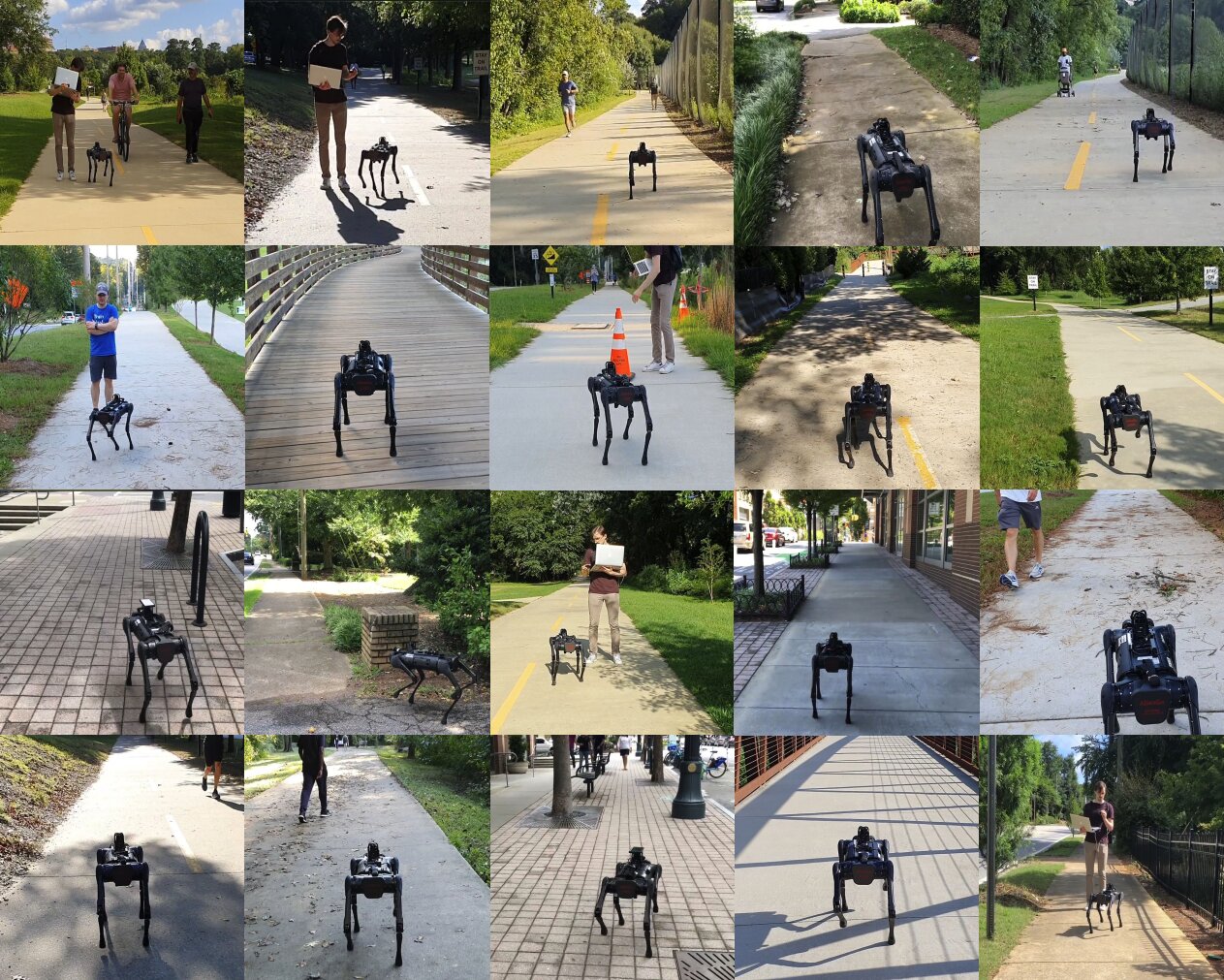
Usando a estrutura de aprendizagem de dois estágios que desenvolveram, Ha, Sorokin e seus colegas foram capazes de atingir uma política eficaz usando informações “privilegiadas” na simulação e, em seguida, transferir os comportamentos adquiridos pela estrutura para um robô de quatro patas real. avaliaram a estrutura, eles descobriram que ela superou outros modelos de última geração para navegação em calçadas. Em seguida, também testaram sua estrutura em um cenário do mundo real, aplicando-a ao robô AlienGo enquanto ele navegava nas calçadas em Atlanta.

“Além dos ganhos de desempenho com o uso do aprendizado em dois estágios com o mundo abstrato, foi surpreendente ver como a transferência para o mundo real foi fácil com nosso aumento / curadoria de dados”, acrescentou Sorokin. “Dado que durante o treinamento o robô nunca viu nenhuma imagem de calçada do mundo real e dadas todas as complexidades do mundo real, o desempenho sem qualquer adaptação foi notável, para dizer o mínimo. Nossas descobertas podem implicar que muitos trabalhos recentes o aprendizado da robótica poderia ser transferido para o mundo real e, com sorte, usado na prática para beneficiar a humanidade. ”
No futuro, o robô quadrúpede desenvolvido por esta equipe de pesquisadores poderá ser usado para realizar uma variedade de tarefas, como entrega de parcelas ou monitoramento de ambientes urbanos. Além disso, a estrutura que desenvolveram pode ser aplicada a outros robôs móveis existentes ou emergentes para melhorar sua capacidade de se mover e navegar nas calçadas.
“Embora tenhamos feito muito progresso na transferência de sim para real para navegação, ainda existem muitos desafios restantes”, disse Sorokin. “Alguns dos desafios relacionados à navegação que ainda precisamos superar incluem cruzamento de estradas, manuseio dinâmico de obstáculos e interação com objetos e humanos do mundo real. No entanto, nossa abordagem não se limita à navegação, ela poderia ser potencialmente aplicada em muitos robôs aplicações, como manipulação, locomoção e outras. Estamos entusiasmados em ver suas aplicações em áreas de pesquisa adjacentes. ”
Publicado em 29/09/2021 07h49
Artigo original:
Estudo original: