


Para navegar pelos arredores com segurança e eficácia, os robôs devem ser apoiados por um sistema de visão por computador de alto desempenho. Um dos maiores desafios ao desenvolver sistemas de visão computacional para robôs é limitar as oclusões para que o robô possa sentir a maior parte do que está ao seu redor.
Pesquisadores da Toshiba Corporation desenvolveram recentemente um sistema de visão de robô que pode reduzir as oclusões em sistemas de visão de robô. Este sistema, apresentado em artigo pré-publicado no arXiv, usa espelhos basculantes para aumentar o espaço coberto pelos sensores de um robô.
“A oclusão representa um grande desafio nos sistemas de visão de robôs”, disse Kentaro Yoshioka, um dos pesquisadores que realizaram o estudo, à Tech Xplore. “As oclusões podem causar erros na percepção do robô, causando negligência ou pior, até mesmo danificar o robô ou objetos.”
Até agora, os pesquisadores desenvolveram duas abordagens principais para reduzir as oclusões em sistemas de visão de robôs. O primeiro é baseado na instalação de mais sensores ou câmeras nos ambientes que um robô está explorando e o segundo na integração de sensores diretamente em robôs móveis. Embora essas abordagens possam diminuir as oclusões, ambas têm limitações significativas.
“Uma maneira de reduzir as oclusões em sistemas de visão robótica é instalar vários sensores no local de trabalho”, disse Yoshioka. “Embora seja uma abordagem direta, pode reduzir com eficiência as oclusões sem afetar o robô. No entanto, essa abordagem aumenta significativamente o custo do sensor. Como alternativa, também podemos instalar sensores no próprio robô e reduzir as oclusões manipulando o robô para detectar de vários pontos de vista. Embora o custo do sensor possa ser reduzido, isso prejudica a eficiência de trabalho do robô. ”
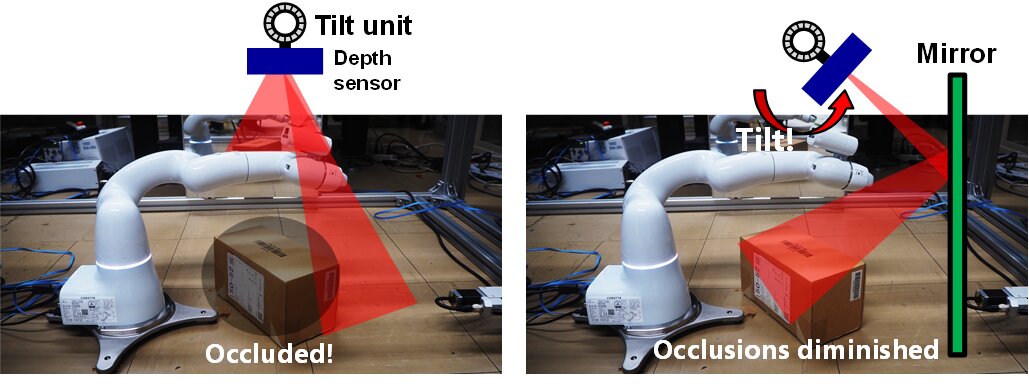
Para eliminar as oclusões nos sistemas de visão do robô, Yoshioka e seus colegas propuseram um novo mecanismo que inclina os sensores para enfrentar um espelho e, em seguida, recupera as imagens do ambiente refletidas no espelho. Embora outros estudos tenham experimentado sensoriamento 3D por meio de reflexos de espelho, essa equipe de pesquisadores foi uma das primeiras a explorar essa técnica para reduzir ou eliminar oclusões em sistemas de visão de robôs.
“Nosso sistema funciona com a detecção do sensor zenital usual (chamando-o de detecção direta) e detectando a oclusão a partir dos resultados da detecção direta”, explicou Yoshioka. “Ajustamos a inclinação do sensor com um ângulo de inclinação ideal para que possamos eliminar as oclusões de forma eficiente com sensor de reflexão.”
A nova abordagem de visão do robô proposta por Yoshioka e seus colegas tem várias vantagens sobre os sistemas existentes. Em primeiro lugar, pode ser realizado usando espelhos baratos e unidades de inclinação, portanto, economiza o custo de aquisição de vários sensores 3D caros. Além disso, o movimento de inclinação executado pelos sensores é um movimento de eixo único simples que pode ser executado muito mais rápido do que um robô com sensores integrados moveria seus membros para sentir outras partes de seus arredores.
“Nosso sistema detecta a oclusão na cena a partir dos resultados de detecção direta em tempo real e, usando as coordenadas da área de oclusão, o ângulo de inclinação ideal é calculado”, disse Yoshioka. “Assim, mesmo que o robô na cena se mova, nosso sistema não precisa ser reprogramado e pode reduzir as oclusões de forma adaptativa.”
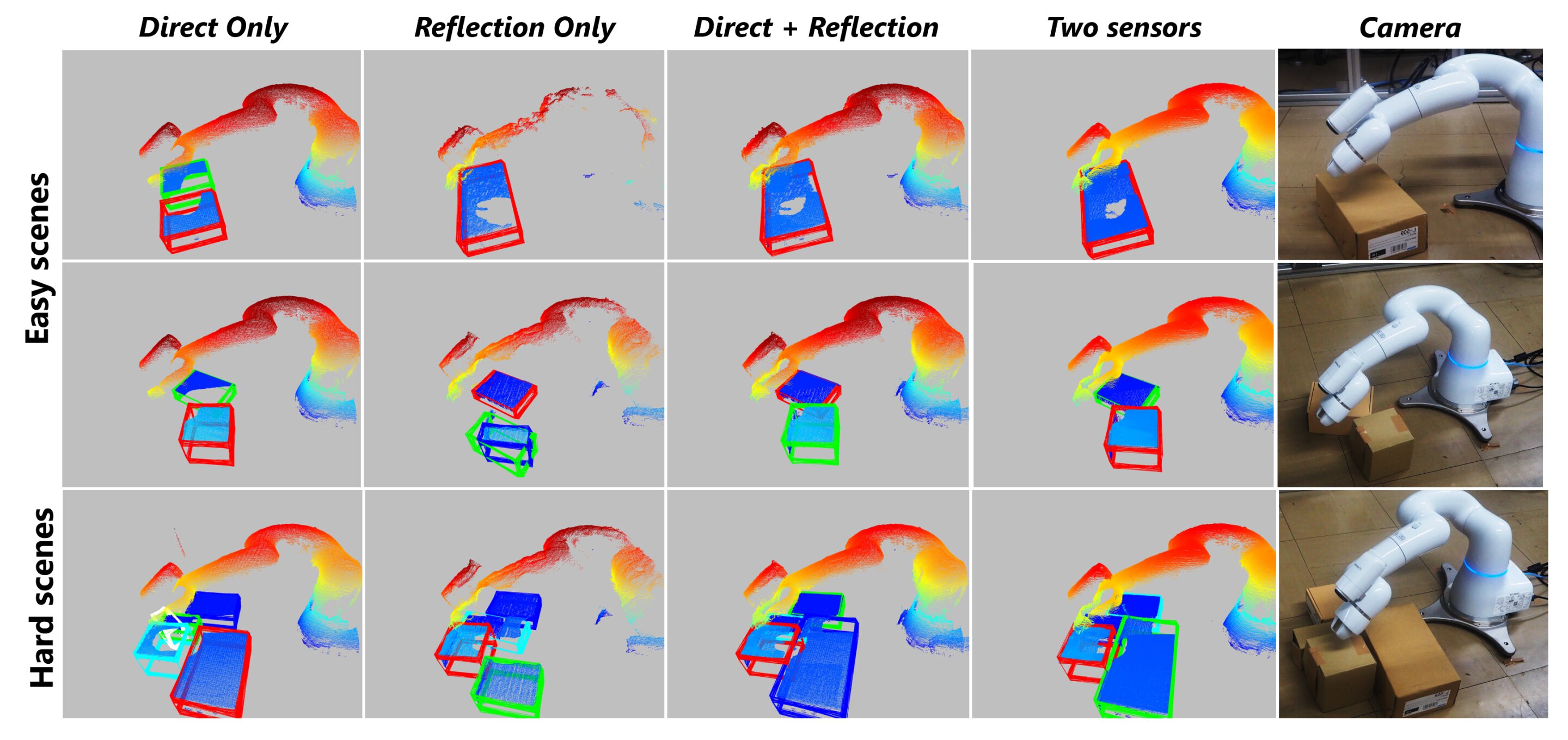
Yoshioka e seus colegas avaliaram seu sistema em uma série de experimentos usando COBOTTA, um braço robótico desenvolvido pela DENSO, uma empresa japonesa de propriedade da Toyota. Eles descobriram que seu sistema levou a uma melhoria significativa na precisão em comparação com os sistemas de detecção direta. Notavelmente, a equipe foi capaz de atingir a mesma precisão de detecção alcançada por sistemas de detecção de robôs que empregam dois sensores 3D.
No futuro, a nova abordagem apresentada neste artigo recente pode ser usada para melhorar o desempenho, a mobilidade e as capacidades de navegação de sistemas robóticos existentes e emergentes. Enquanto isso, Yoshioka e seus colegas planejam explorar maneiras de melhorar ainda mais o desempenho de seu sistema.
“Até agora, nosso sistema usou apenas um único espelho”, disse Yoshioka. “Estender isso para configurações de vários espelhos será nossa direção para pesquisas futuras. Ao adicionar mais espelhos, podemos adaptar o sistema a cenários e ambientes de caso mais desafiadores (por exemplo, configurações de vários robôs).”
Yoshioka deixou recentemente a Toshiba. Todas as opiniões aqui expressas são de sua autoria e não expressam as visões ou opiniões da empresa.
Publicado em 22/09/2021 07h03
Artigo original:
Estudo original: