


A robótica de enxame é um campo de pesquisa relativamente novo e altamente promissor, que envolve o desenvolvimento de equipes de multi-robôs que podem se mover e completar tarefas juntas. Enxames de robôs podem ter inúmeras aplicações valiosas. Por exemplo, eles poderiam apoiar humanos durante as missões de busca e resgate ou permitir que eles monitorassem áreas geográficas de difícil acesso.
Pesquisadores da Fraunhofer FKIE e da Universidade de Bonn, na Alemanha, desenvolveram recentemente uma construção teórica que pode guiar o desenvolvimento de sistemas auto-organizados de enxame humano. Esta construção, apresentada em um artigo publicado na revista Adaptive Behavior de Sage, fornece uma nova perspectiva holística para a interação humano-enxame, que a equipe se refere como “laços humanos-enxame conjuntos”.
“Nós nos concentramos no subcampo da robótica que investiga a interação humano-enxame”, disse Jonas D. Hasbach, um dos pesquisadores que realizaram o estudo, ao TechXplore. “Até agora, não existe uma perspectiva geral sobre como poderíamos projetar da melhor forma as futuras interações humano-enxame. O objetivo do nosso artigo foi fornecer à comunidade de pesquisa uma base teórica, uma forma de pensar, que pode relacionar soluções isoladas em humanos. interação de enxame. ”
Quando os pesquisadores estão tentando projetar “loops” para interações humanos-enxame que funcionam bem em configurações do mundo real, eles deveriam considerar idealmente essas interações em sua totalidade. Por exemplo, especificar como os humanos podem sinalizar sua intenção para um enxame de robôs não é suficiente e as abordagens também devem considerar como o enxame de robôs pode oferecer feedback aos usuários humanos.
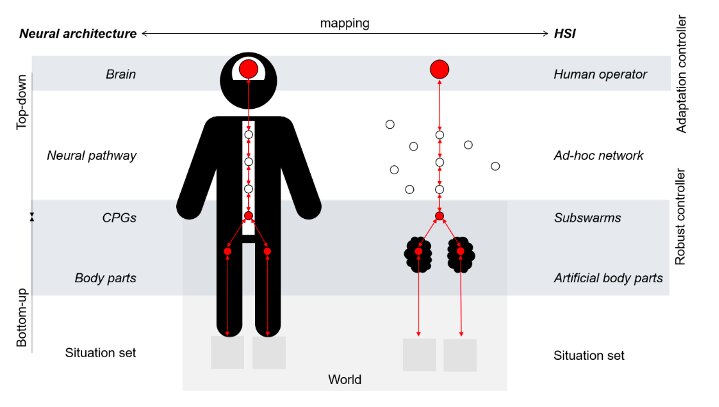
“Perguntamos de um ponto de vista teórico como poderíamos juntar os benefícios da cognição humana com os benefícios de enxames de robôs auto-organizados no contexto de um mundo complexo”, disse Hasbach. “Isso levou a uma metáfora bioinspirada para o design, o humano amplificado por enxame, que essencialmente propõe que o enxame deve se auto-organizar e agir como partes do corpo humano. Nossa hipótese é que essa visão pode ser uma boa metáfora para projetar humanos -loops de enxame que são capazes de lidar com a dinâmica do mundo real. ”
Em situações em que um enxame de robôs atua como uma extensão de humanos (ou seja, ajudando humanos a completar uma tarefa cobrindo áreas que eles não podem cobrir), a metáfora de design introduzida por esta equipe de pesquisadores pode ser usada para navegar no complexo espaço de design de humanos. interações de enxame. Isso pode levar ao desenvolvimento de sistemas humanos-enxame que são mais eficientes e podem ser aplicados em cenários mais complexos.

“Por exemplo, podemos perguntar como é o controle real de uma parte do corpo e mapear isso no design da interface humano-enxame”, explicou Hasbach. “Quantas vezes você já pensou conscientemente sobre o movimento das pernas ao caminhar pela rua? Provavelmente não com tanta frequência. Isso faz sentido de uma perspectiva evolucionária; o controle estereotipado do corpo é cuidado por subsistemas neurais para que o sistema cognitivo consciente possa lidar com mais dinâmica mundial complexa. ”
O artigo de Hasbach e seus colegas destaca os benefícios potenciais de usar a classificação do estado humano como uma entrada de controle alimentada a um enxame de robôs, em vez de ter um usuário humano controlando o enxame o tempo todo. A metáfora do design introduzida pelos pesquisadores também pode servir de inspiração para o desenvolvimento do que às vezes é referido como “cognição de enxame”. Esta é a ideia de que enxames biológicos (por exemplo, formigas, povos pássaros) e o cérebro compartilham princípios de auto-organização semelhantes que levam à cognição e à tomada de decisão.
A ideia de “cognição de enxame” ainda não foi explorada no contexto da engenharia. O trabalho dos pesquisadores pode abrir possibilidades interessantes para o desenvolvimento de enxames de robôs inspirados tanto no cérebro quanto em enxames biológicos.
“Projetar enxames de robôs que são uma extensão do corpo humano está relacionado à integração da lógica neural em enxames de robôs no nível da rede, que recebeu apenas atenção limitada até agora”, disse Hasbach. “Propusemos algumas idéias sobre como os enxames de robôs podem ser considerados sistemas neurais.”
No futuro, a abordagem teórica idealizada por esta equipe de pesquisadores poderá inspirar o desenvolvimento de novos sistemas que possibilitem interações efetivas entre humanos e enxames de robôs. Em seu artigo, Hasbach e seus colegas também apresentaram os resultados de um experimento interessante que mostrou como um enxame de robôs pode ser considerado uma interface auto-organizada por si só.
“Até agora, nossos conceitos são de natureza puramente teórica, mas atualmente estamos implementando protótipos para que possamos investigar empiricamente o humano amplificado por enxame”, disse Hasbach. “Os dados empíricos serão usados para atualizar o humano amplificado por enxame como uma teoria científica sobre como projetar a interação humano-enxame.”
Publicado em 08/08/2021 23h07
Artigo original:
Estudo original: