


Para permitir a operação eficiente de veículos aéreos não tripulados (UAVs) em casos em que um sistema de localização global (GPS) ou um dispositivo de posicionamento externo (por exemplo, um refletor de laser) está indisponível, os pesquisadores devem desenvolver técnicas que estimam automaticamente a posição de um robô. Se o ambiente em que um drone opera não muda com muita frequência e é possível construir um mapa 3D desse ambiente, as técnicas de localização de robôs baseadas em mapas podem ser bastante eficazes.
Idealmente, as abordagens de estimativa de pose baseadas em mapas devem ser eficientes, robustas e confiáveis, pois devem enviar rapidamente a um robô as informações de que ele precisa para planejar suas ações e movimentos futuros. Os sistemas de detecção e alcance de luz 3D (LIDAR) são sistemas de localização baseados em mapas particularmente promissores, pois reúnem um rico conjunto de informações 3D, que os drones podem então usar para localização.
Pesquisadores da Universidad Pablo de Olavide na Espanha desenvolveram recentemente uma nova estrutura para localização baseada em mapas chamada localização LIDAR direta (DLL). Esta abordagem, apresentada em um artigo pré-publicado no arXiv, poderia superar algumas das limitações de outras técnicas de localização LIDAR introduzidas no passado.
“O principal objetivo da abordagem que apresentamos é construir um sistema de localização 3D baseado em mapas 3D do ambiente”, disse Fernando Caballero, um dos pesquisadores que realizaram o estudo, ao TechXplore. “O método é especialmente projetado para trabalhar com robôs aéreos, embora também possa ser aplicado a outros sistemas. A localização baseada em mapas é essencial para muitas aplicações de robótica, como monitoramento, logística ou inspeção em áreas proibidas por GPS, como armazéns , cânions urbanos e ambientes internos. ”
A maioria das técnicas LIDAR de última geração existentes utiliza os recursos geométricos de objetos para alinhar os dados coletados por sensores com um mapa do ambiente circundante. Embora essas abordagens para o registro 3D LIDAR tenham suas vantagens, elas geralmente não funcionam bem em todos os cenários.
O DLL, a abordagem desenvolvida por Caballero e seu colega Luis Merino, implementa uma nuvem de pontos para o registro de mapas com base na otimização não linear da distância entre os pontos individuais e um mapa. Isso significa que ele não depende de características específicas ou correspondências pontuais. Dada uma pose inicial, a estrutura pode rastrear a pose de um robô, simplesmente refinando sua pose prevista com base nos dados coletados por sensores de movimento.
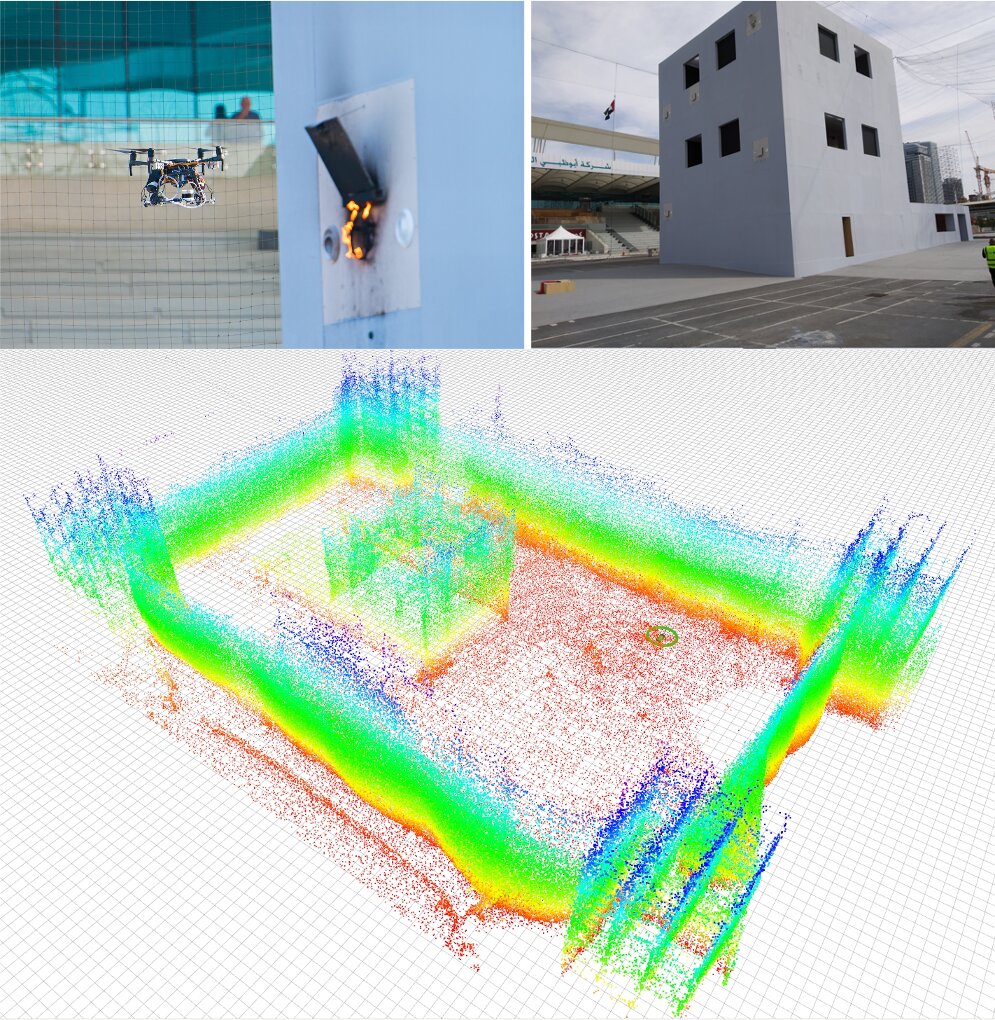
“Supondo que o robô carregue um LIDAR 3D que permite a detecção da distância até os obstáculos nas proximidades do robô, o objetivo do DLL é estimar a posição do robô em um mapa 3D”, disse Caballero. “Com base nessas informações, o DLL encontra os melhores alinhamentos das informações 3D LIDAR no mapa 3D.”
Caballero e Merino avaliaram o DLL em uma série de testes e o compararam a outras técnicas de estimativa de pose. Eles descobriram que, embora sua precisão fosse semelhante à alcançada por outros métodos de estimativa de pose de última geração, o DLL é aproximadamente dez vezes mais rápido do que outros métodos e poderia, portanto, ser usado para estimar a pose de um robô em tempo real.
“O DLL também é robusto contra odometria ruidosa (o que é muito comum em robôs aéreos) e demonstramos que é capaz de lidar com erros significativos na odometria do robô, com pouco impacto em sua precisão geral”, disse Caballero.
O DLL já está disponível publicamente e pode ser acessado por desenvolvedores em todo o mundo no GitHub. No futuro, ele pode ser usado para localizar robôs aéreos de forma rápida, precisa e confiável, especialmente em ambientes onde a tecnologia GPS não funciona.
“Acreditamos que o DLL pode ajudar a alcançar a navegação autônoma em áreas onde os sinais de GPS não estão disponíveis”, disse Caballero. “Em nosso trabalho futuro, consideraremos melhorar a eficiência de espaço de nosso método. Uma de suas principais desvantagens é a quantidade de memória exigida pelo mapa 3D, portanto, consideraremos estruturas mais eficientes.”
Publicado em 22/04/2021 09h11
Artigo original:
Estudo original: