



Engenheiros da Universidade da Califórnia em San Diego criaram um robô macio de quatro patas que não precisa de nenhum aparelho eletrônico para funcionar. O robô precisa apenas de uma fonte constante de ar pressurizado para todas as suas funções, incluindo seus controles e sistemas de locomoção.
A equipe, liderada por Michael T. Tolley, professor de engenharia mecânica da Jacobs School of Engineering da UC San Diego, detalha suas descobertas na edição de 17 de fevereiro de 2021 da revista Science Robotics.
“Este trabalho representa um passo fundamental, porém significativo, em direção a robôs ambulantes totalmente autônomos e livres de eletrônicos”, disse Dylan Drotman, Ph.D. estudante do grupo de pesquisa de Tolley e o primeiro autor do artigo.
As aplicações incluem robótica de baixo custo para entretenimento, como brinquedos e robôs que podem operar em ambientes onde a eletrônica não pode funcionar, como máquinas de ressonância magnética ou poços de minas. Os robôs leves são de particular interesse porque se adaptam facilmente ao ambiente e operam com segurança perto de humanos.
A maioria dos robôs soft são movidos a ar pressurizado e controlados por circuitos eletrônicos. Mas essa abordagem requer componentes complexos, como placas de circuito, válvulas e bombas – muitas vezes fora do corpo do robô. Esses componentes, que constituem o cérebro e o sistema nervoso do robô, são geralmente volumosos e caros. Em contraste, o robô da UC San Diego é controlado por um sistema leve e de baixo custo de circuitos pneumáticos, feito de tubos e válvulas flexíveis, a bordo do próprio robô. O robô pode andar sob comando ou em resposta a sinais que detecta do ambiente.
“Com nossa abordagem, você poderia fazer um cérebro robótico muito complexo”, disse Tolley, autor sênior do estudo. “Nosso foco aqui era fazer o sistema nervoso movido a ar mais simples necessário para controlar o andar.”
O poder computacional do robô imita grosso modo os reflexos dos mamíferos que são impulsionados por uma resposta neural da espinha em vez do cérebro. A equipe foi inspirada por circuitos neurais encontrados em animais, chamados geradores de padrões centrais, feitos de elementos muito simples que podem gerar padrões rítmicos para controlar movimentos como caminhar e correr.
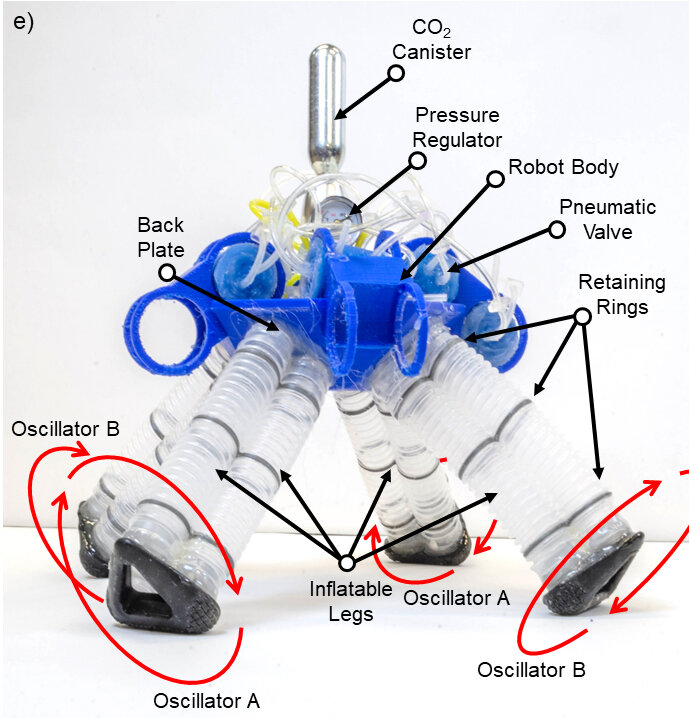
Para imitar as funções do gerador, os engenheiros construíram um sistema de válvulas que atuam como osciladores, controlando a ordem em que o ar pressurizado entra nos músculos movidos a ar nos quatro membros do robô. Os pesquisadores construíram um componente inovador que coordena a marcha do robô, retardando a injeção de ar nas pernas do robô. O andar do robô foi inspirado nas tartarugas sideneck.

O robô também é equipado com sensores mecânicos simples – pequenas bolhas macias cheias de fluido colocadas na extremidade das barras que se projetam do corpo do robô. Quando as bolhas são pressionadas, o fluido vira uma válvula no robô que faz com que ele mude de direção.
O artigo da Science Robotics baseia-se em trabalhos anteriores de outros grupos de pesquisa que desenvolveram osciladores e sensores baseados em válvulas pneumáticas e adiciona os componentes necessários para alcançar funções de alto nível, como caminhar.
Como funciona
O robô está equipado com três válvulas que atuam como inversores que fazem com que um estado de alta pressão se espalhe pelo circuito a ar, com um atraso em cada inversor.
Cada uma das quatro pernas do robô possui três graus de liberdade movidos por três músculos. As pernas são inclinadas para baixo em 45 graus e compostas por três câmaras cilíndricas pneumáticas conectadas paralelas com fole. Quando uma câmara é pressurizada, o membro se curva na direção oposta. Como resultado, as três câmaras de cada membro fornecem a flexão multieixo necessária para caminhar. Os pesquisadores emparelharam as câmaras de cada perna na diagonal uma da outra, simplificando o problema de controle.
Uma válvula suave muda a direção de rotação dos membros entre anti-horário e horário. Essa válvula atua como o que é conhecido como uma chave de duplo pólo com trava – uma chave com duas entradas e quatro saídas, de modo que cada entrada tem duas saídas correspondentes às quais está conectada. Esse mecanismo é um pouco como pegar dois nervos e trocar suas conexões no cérebro.
Próximos passos
No futuro, os pesquisadores querem melhorar a marcha do robô para que ele possa andar em terrenos naturais e superfícies irregulares. Isso permitiria ao robô navegar por uma variedade de obstáculos. Isso exigiria uma rede de sensores mais sofisticada e, como resultado, um sistema pneumático mais complexo.
A equipe também analisará como a tecnologia pode ser usada para criar robôs, que são em parte controlados por circuitos pneumáticos para algumas funções, como caminhar, enquanto os circuitos eletrônicos tradicionais lidam com funções superiores.
Publicado em 18/02/2021 10h35
Artigo original:
Estudo original: