



Cientistas da Universidade de Southampton e da Universidade de Edimburgo desenvolveram um robô subaquático flexível que pode se propelir pela água no mesmo estilo do nadador mais eficiente da natureza – a água-viva Aurelia aurita.
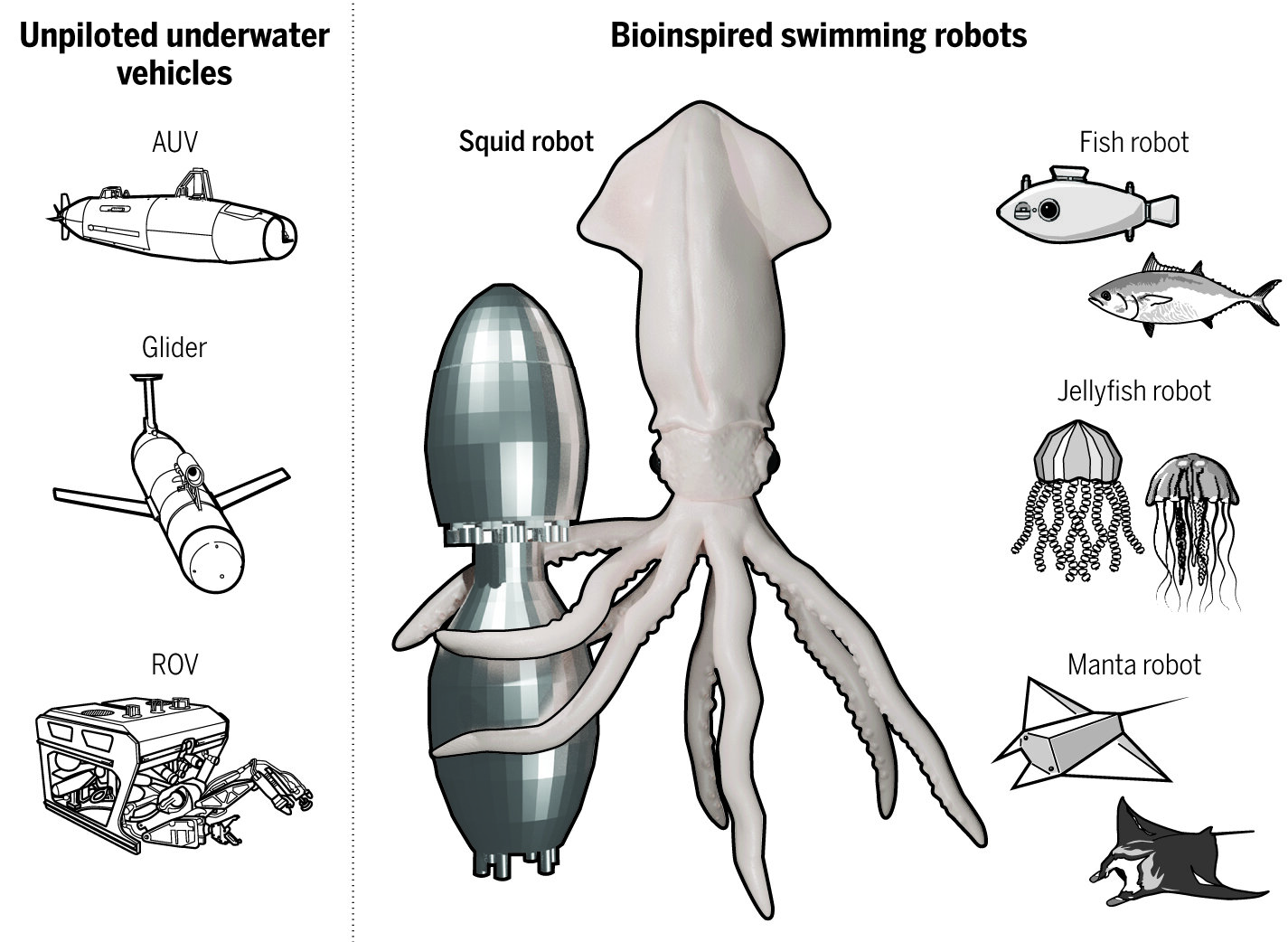
As descobertas, publicadas na Science Robotics, demonstram que o novo robô subaquático pode nadar tão rápida e eficientemente quanto a lula e a água-viva que inspiraram seu design, potencialmente desbloqueando novas possibilidades para a exploração subaquática com seu design leve e exterior macio.
O co-autor, Dr. Francesco Giorgio-Serchi, professor e bolsista do chanceler da Escola de Engenharia da Universidade de Edimburgo, disse: “O fascínio por organismos como lulas, águas-vivas e polvos tem crescido enormemente porque eles são bastante únicos nisso sua falta de estrutura esquelética de apoio não os impede de grandes feitos de natação. ”
O “custo de transporte” é usado para comparar as eficiências das espécies em toda a biologia e, por essa medida, a água-viva é o animal mais eficiente da natureza, vencendo facilmente os animais que correm e voadores e os peixes ósseos.
O novo robô foi desenvolvido na Universidade de Southampton e é o primeiro submersível a demonstrar os benefícios do uso de ressonância para propulsão subaquática. A ressonância se refere a grandes vibrações que ocorrem ao aplicar uma força na frequência ideal, como empurrar uma criança em um balanço. Isso permite que o robô use muito pouca energia, mas gere grandes jatos de água para se impulsionar para frente.
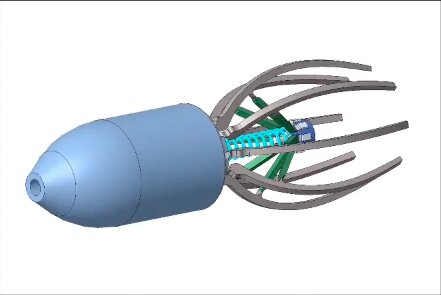
O mecanismo simples, mas eficaz, consiste em uma membrana de borracha envolvendo oito nervuras flexíveis impressas em 3-D, que juntas formam um “sino propulsor”. Um pequeno pistão na metade superior do robô bate no sino repetidamente para que ele se expanda e salte de volta. Isso imita a técnica de natação de uma água-viva e produz os jatos de fluido para impulsionar o robô na água. Quando o pistão opera na frequência correta – a ressonância natural dos componentes – o robô pode se mover a um comprimento de corpo por segundo e igualar a eficiência da água-viva Aurella aurita.
Os últimos testes mostram que o novo robô é dez a cinquenta vezes mais eficiente do que pequenos veículos subaquáticos típicos movidos a hélices. Essa eficiência aumentada, combinada com os benefícios adicionais do exterior macio e flexível do robô, o tornaria ideal para operar próximo a ambientes sensíveis, como recifes de coral, sítios arqueológicos ou mesmo em águas lotadas de nadadores.
O co-autor Thierry Bujard, um estudante de mestrado em Arquitetura Naval na Universidade de Southampton, projetou e construiu o robô em questão de meses. Thierry disse: “As tentativas anteriores de impulsionar robôs subaquáticos com sistemas de jateamento envolveram empurrar água através de um tubo rígido, mas queríamos ir mais além, então trouxemos elasticidade e ressonância para imitar a biologia. Fiquei realmente surpreso com os resultados, estava confiante que o projeto funcionaria, mas a eficiência do robô era muito maior do que eu esperava. ”
O Dr. Gabriel Weymouth, professor associado da Escola de Engenharia da Universidade, que supervisionou o projeto, acrescentou: “A grande vantagem de usar a ressonância é que podemos alcançar grandes vibrações do sino propulsor com uma quantidade muito pequena de potência; só precisamos tire-o da forma e deixe a elasticidade e a inércia fazerem o resto. Isso nos permitiu destravar a eficiência da propulsão usada pelas criaturas marinhas que usam jatos para nadar.
“A última década viu um aumento na pesquisa de robôs flexíveis e de inspiração biológica, como o” Big Dog “de Boston Dynamic, porque eles podem ser muito mais versáteis do que os robôs padrão da indústria. Esta pesquisa demonstra que esses conceitos também podem ser aplicados a robótica subaquática.
“Ainda existem muitos desafios e possibilidades empolgantes para explorar com tecnologias robóticas subaquáticas suaves. Estamos agora procurando estender o conceito por trás deste robô para um veículo subaquático totalmente manobrável e autônomo, capaz de detectar e navegar em seu ambiente.”
Publicado em 23/01/2021 15h51
Artigo original:
Estudo original: