


Pesquisadores no Japão e na Itália estão adotando o caos e a física não linear para criar movimentos semelhantes aos de insetos para pequenos robôs – completos com um controlador de locomoção para fornecer uma interface cérebro-máquina.
A biologia e a física são permeadas por fenômenos universais fundamentados fundamentalmente na física não linear e inspiraram o trabalho dos pesquisadores.
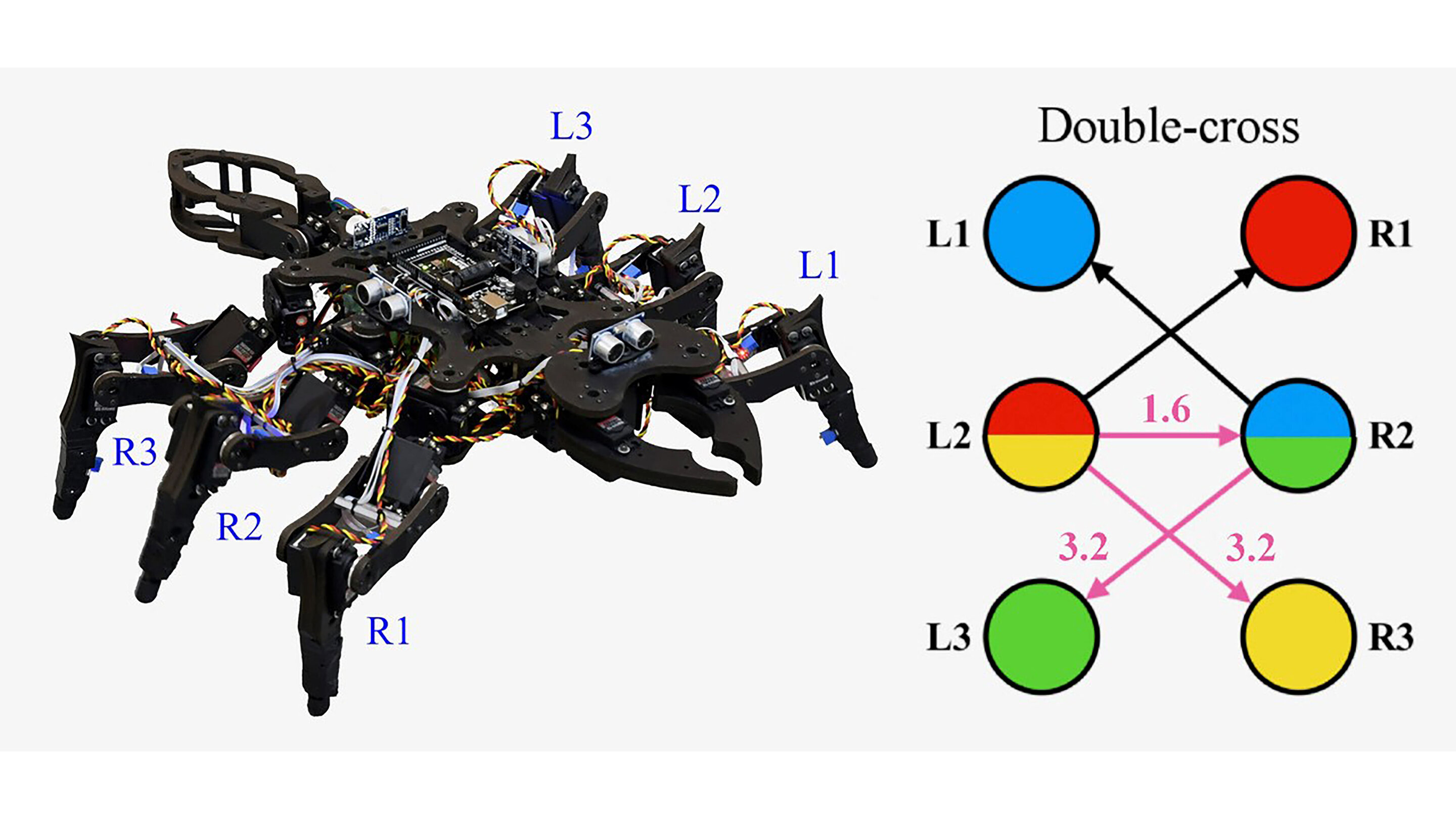
No jornal Chaos, o grupo descreve o uso do sistema Rössler, um sistema de três equações diferenciais não lineares, como um bloco de construção para geradores de padrão central (CPGs) para controlar a marcha de um inseto robótico.
“A natureza universal dos fenômenos subjacentes nos permitiu demonstrar que a locomoção pode ser alcançada por meio de combinações elementares de sistemas Rössler, que representam uma pedra angular na história dos sistemas caóticos”, disse Ludovico Minati, do Instituto de Tecnologia de Tóquio e da Universidade de Trento.
Fenômenos relacionados à sincronização permitem ao grupo criar redes muito simples que geram padrões rítmicos complexos.
“Essas redes, CPGs, são a base da locomoção por pernas em todos os lugares da natureza”, disse ele.
Os pesquisadores começaram com uma rede minimalista em que cada instância está associada a uma perna. Alterar a marcha ou criar uma nova pode ser realizada simplesmente fazendo pequenas alterações no acoplamento e nos atrasos associados.
Em outras palavras, a irregularidade pode ser adicionada tornando os sistemas individuais ou toda a rede mais caótica. Para sistemas não lineares, uma mudança de saída não é proporcional a uma mudança de entrada.
Este trabalho mostra que o sistema Rössler, além de suas muitas propriedades interessantes e intrincadas, “também pode ser usado com sucesso como um substrato para construir um controlador de locomoção bioinspirado para um robô inseto”, disse Minati.
Seu controlador é construído com um eletroencefalograma para permitir uma interface cérebro-computador.
“A atividade neuroelétrica de uma pessoa é registrada e conceitos não lineares de sincronização de fase são usados para extrair um padrão”, disse Minati. “Esse padrão é então usado como base para influenciar a dinâmica dos sistemas Rössler, que geram o padrão de caminhada do inseto robô.”
Os pesquisadores exploram as idéias fundamentais da dinâmica não linear duas vezes.
“Primeiro, nós os usamos para decodificar a atividade biológica, depois na direção oposta para gerar atividade bioinspirada”, disse ele.
A principal implicação deste trabalho é que “demonstra a generalidade dos conceitos dinâmicos não lineares, como a capacidade do sistema Rössler, que muitas vezes é estudado em um cenário abstrato”, disse Minati, “mas é usado aqui como uma base para gerar biologicamente padrões plausíveis. “
Publicado em 18/12/2020 20h57
Artigo original:
Estudo original: